2.2 B0B 3
Herzlich Willkommen im Digital.Point.
Der BOB3 ist ein kleiner programmierbarer Lernroboter, mit dem Schülerinnen und Schüler spielerisch Programmieren und technisches Denken lernen können. Durch seine LEDs und Sensoren bietet er anschauliche Möglichkeiten, eigene Programme zu testen und zu verstehen.
Es stehen davon 3x12er Sets im Digital.Point bereit bereit.
- 2.2.1 Crashkurs
- 2.2.2 Unterrichtseinheiten
- 2.2.3 Materialisten und Handouts
- 2.2.4 Öffentliche Dokumente und Links
- Klasse 5-6 B1 - Los geht's!
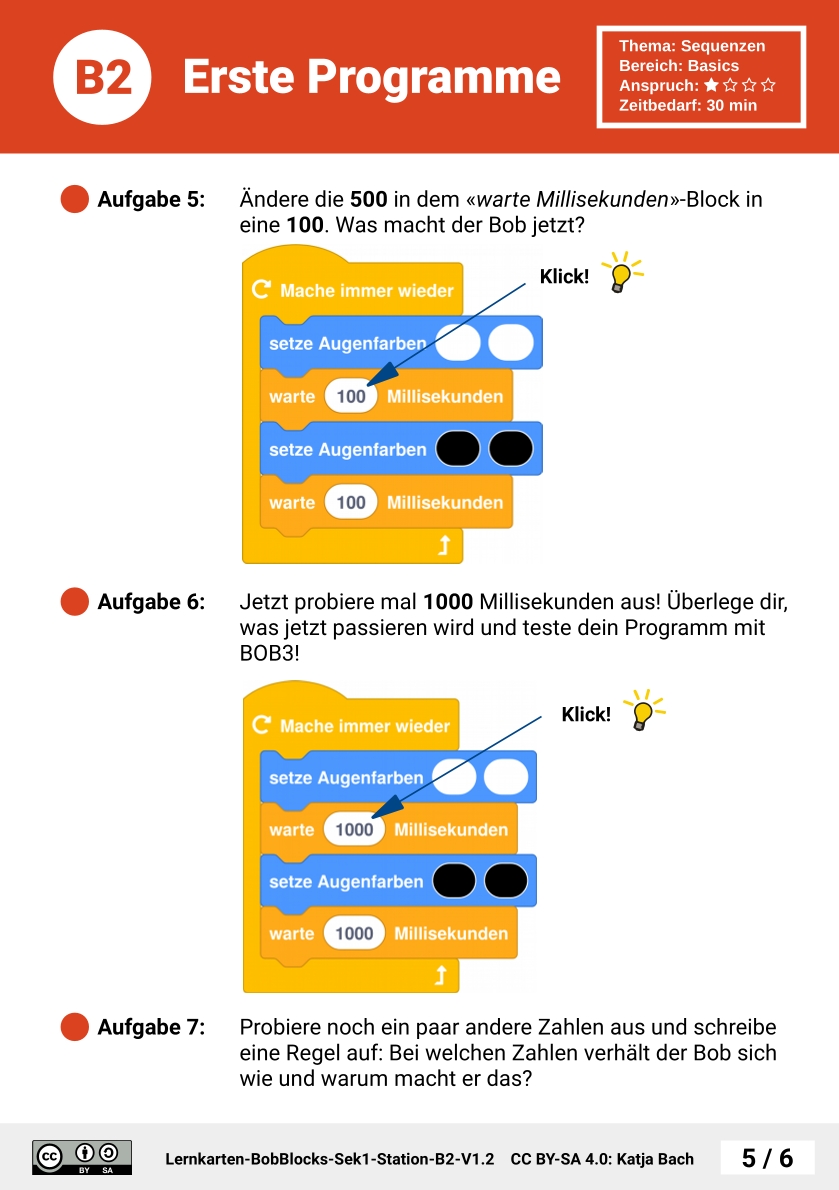
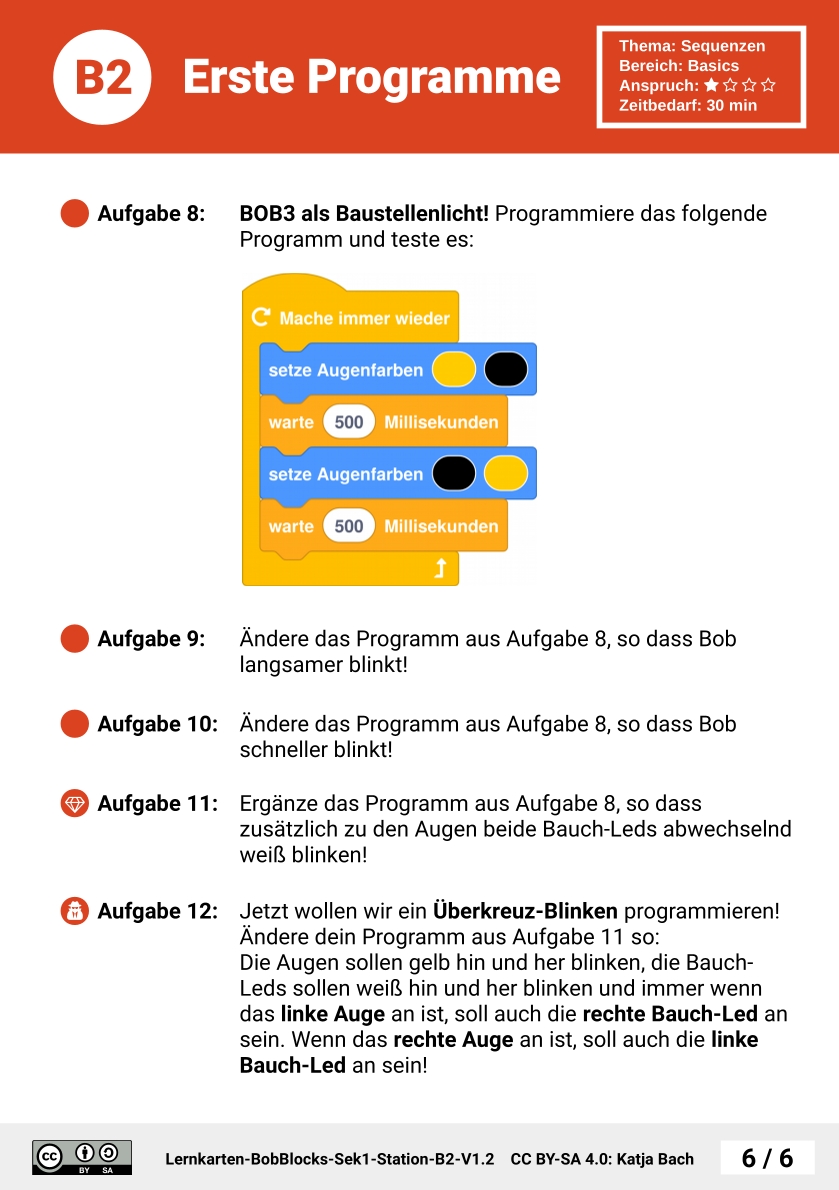
- Klasse 5-6 B2 - Erste Programme
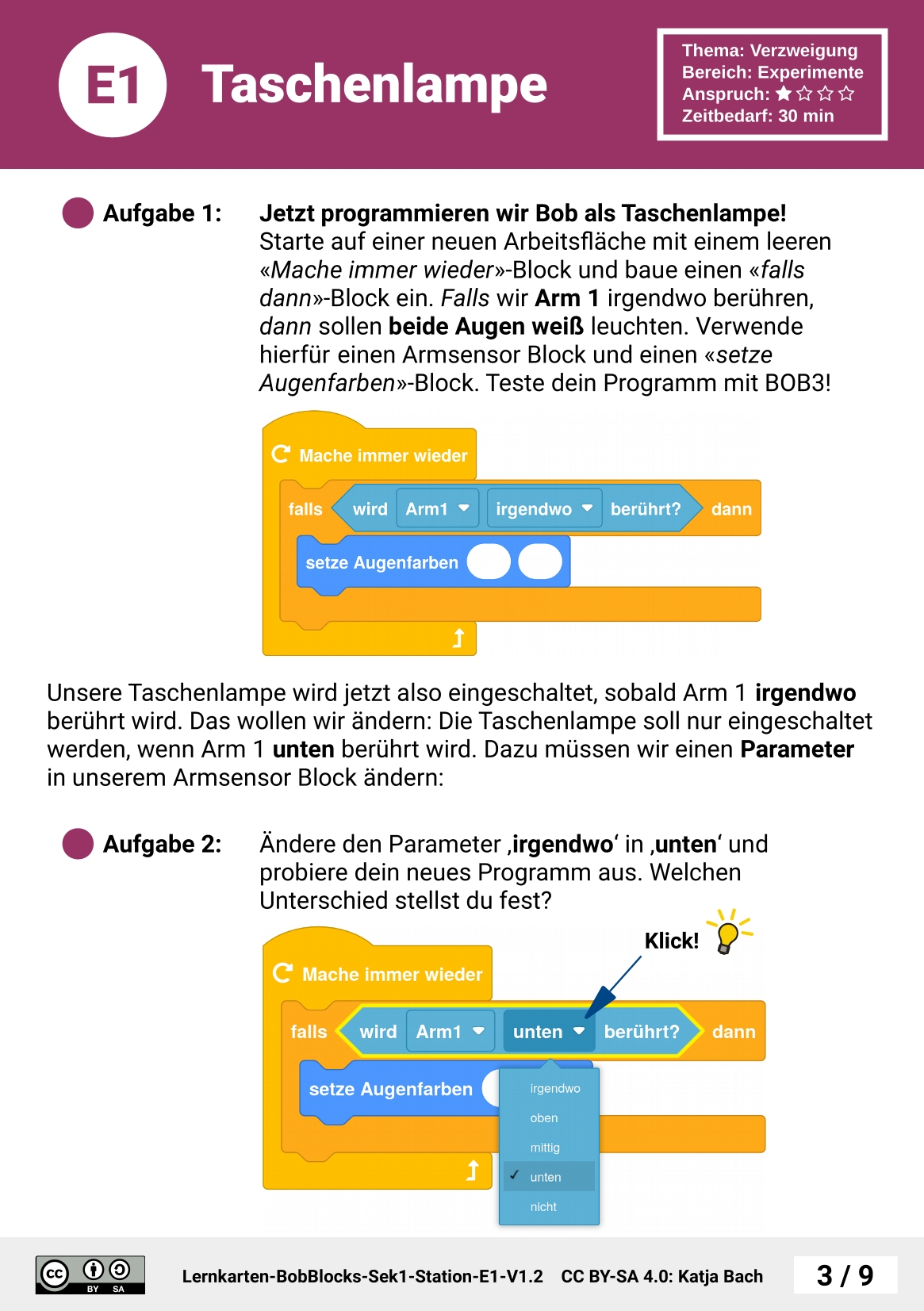
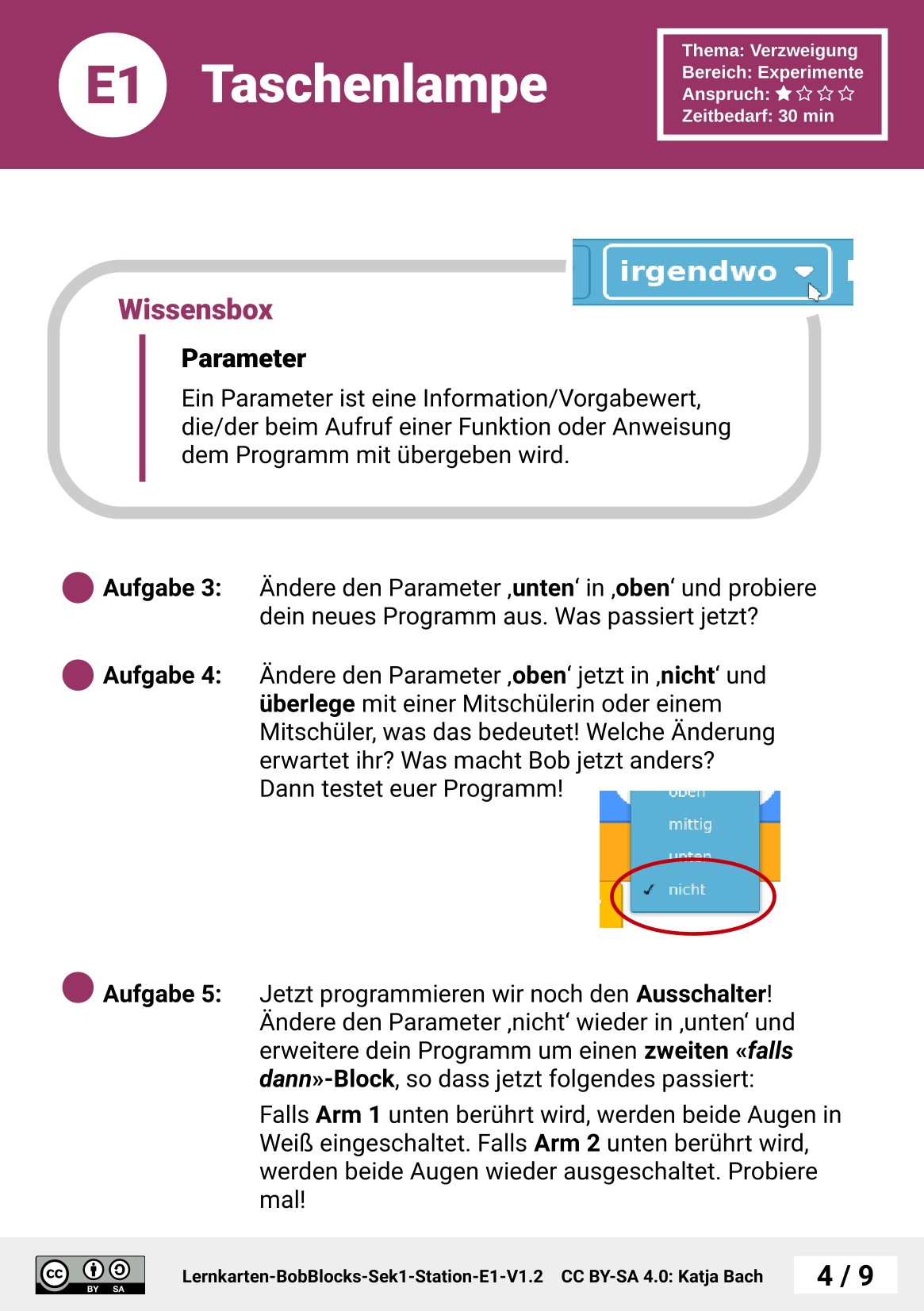
- Klasse 5-6 E1 - Taschenlampe
- Klasse 5-6 E2 - Vogelwarnsystem
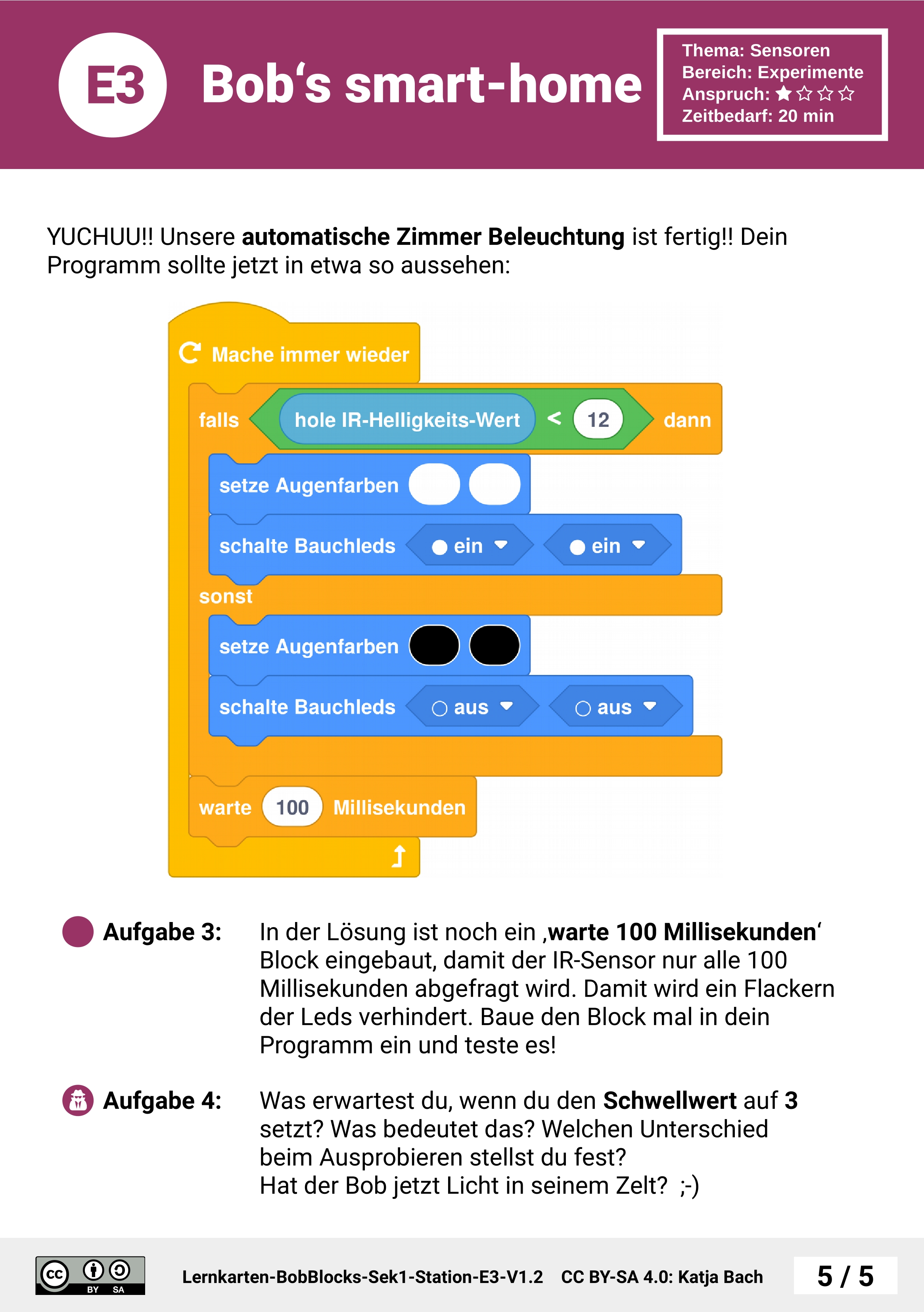
- Klasse 5-6 E3 - Bob's smart-home
- Klasse 5-6 E4 - Alice und Bob
- Klasse 5-6 W1 - Verzweigung
- Klasse 5-6 W2 - Schleifen
- Klasse 5-6 W3 - Operatoren
- Klasse 5-6 W4 - Variablen
- 2.2.B Explore Sciencenter
- 2.2.A WvSS
2.2.1 Crashkurs
Crashkurs für Lehrkräfte

Der Digital.Point Crashkurs
Unsere Digital.Point Crashkurse gibt es für alle unsere Materialien. Sie wurden von uns eigenhändig erstellt und sollen allen Lehrkräften einen kleinen Einstieg in die Materialien ermöglichen. Dabei achten wir darauf, dass der Kurs in etwa 60 Minuten umgesetzt werden kann. So lernen erfahrene Lehrkräfte die besonderen Funktionen kennen, während Anfänger sich mit den Grundfunktionen vertraut machen.
Sie schlüpfen dabei selbst in die Rolle der Schüler und können hoffentlich zu Hause oder am Schreibtisch ein wenig Spaß beim Knobeln haben oder eigene Programme entwickeln – vielleicht sogar bessere als die von uns vorgeschlagenen.
Wir wünschen Ihnen viel Spaß!
Ihr Digital.Point Team
DER BOB-3
Willkommen beim Digital.Point Hildesheim!
In diesem Crashkurs sollen Sie lernen wie der BOB 3 funktioniert, wie Sie ihn programmieren und wie Sie ihn im Digital.Point einsetzen können.
Der BOB 3 scheint zunächst einer der langweiligeren Roboter in unserer Auswahl zu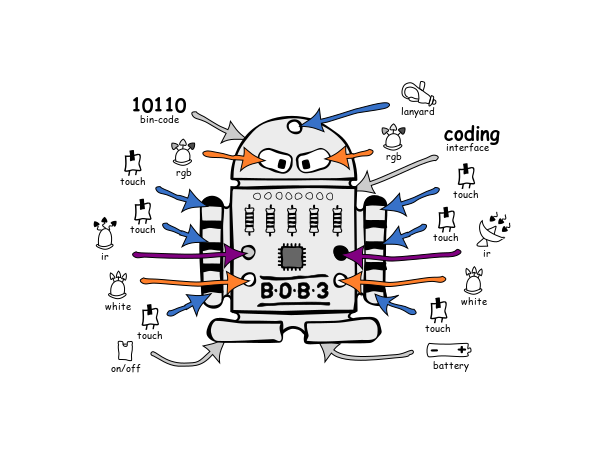 sein, da er sich im Gegensatz zu den anderen nicht bewegen kann. Dennoch bietet der BOB 3 eine Vielzahl an Möglichkeiten ihn für Schüler*innen interessant und abwechslungsreich zu nutzen.
sein, da er sich im Gegensatz zu den anderen nicht bewegen kann. Dennoch bietet der BOB 3 eine Vielzahl an Möglichkeiten ihn für Schüler*innen interessant und abwechslungsreich zu nutzen.
Durch seine verschiedenen Sensoren wie Touch, Licht und Abstandssensoren lassen sich spannende Experimente, kleine Spiele und interaktive Aufgaben gestalten. Außerdem kann er über seine LEDs Emotionen oder Zustände darstellen, was ihn besonders für kreative Programmieraufgaben attraktiv macht.
Mit einfachen Programmierbefehlen können Lernende schnelle Erfolgserlebnisse erzielen und gleichzeitig erste Programmlogiken wie Bedingungen, Schleifen oder Variablen kennenlernen.
Inhaltsverzeichnis:
1. Erste Schritte
1.1 Grundlagen zum BOB3
1.2 Programme auf den BOB3 übertragen
2. Programmieren des BOB3
2.1 Grafisches Programmieren mit BOB Blocks
2.2 Textbasiertes Programmieren mit Prog.Bob
3. Übung für Lehrkräfte
Erste Schritte
Grundlagen zum Roboter:
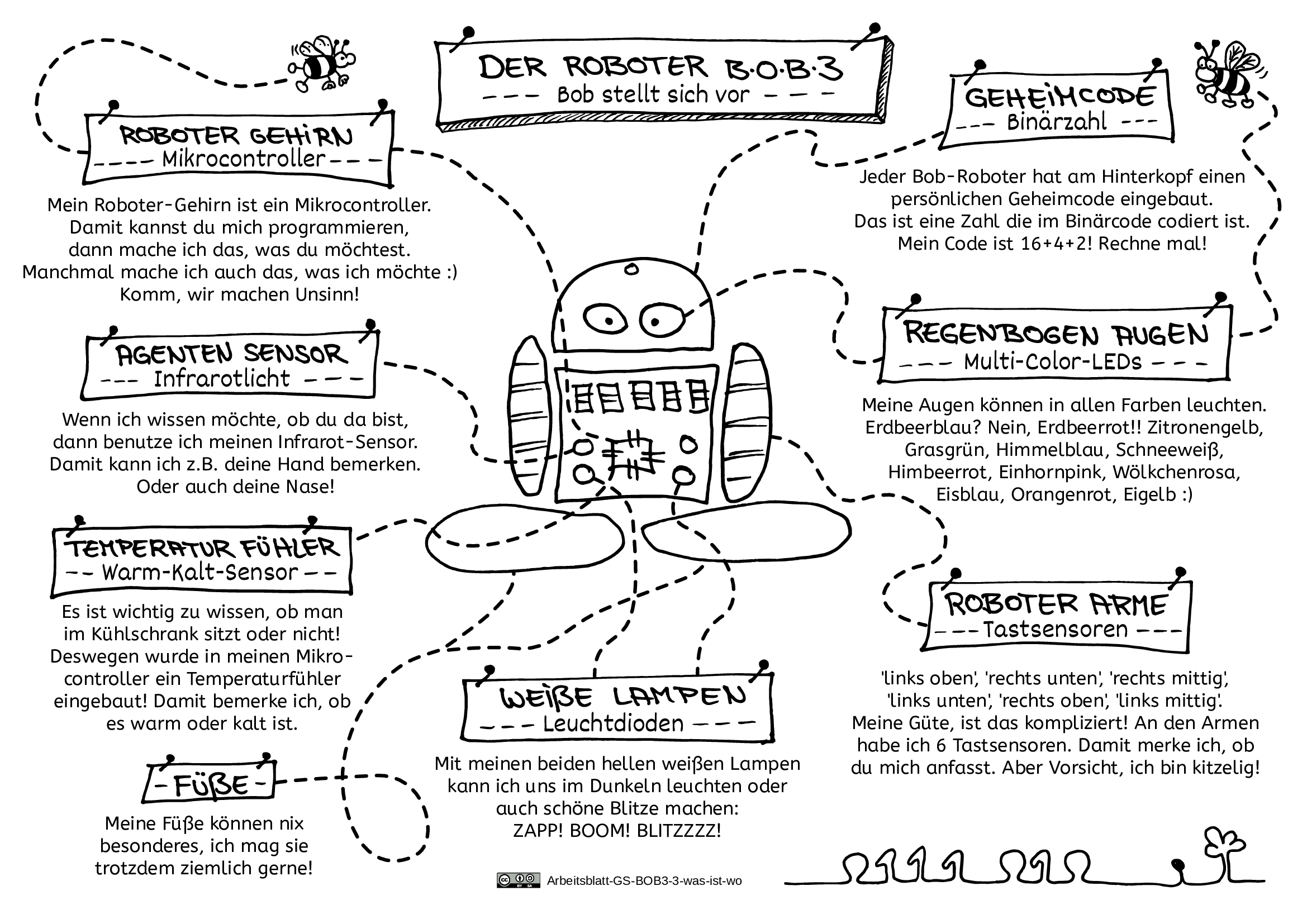
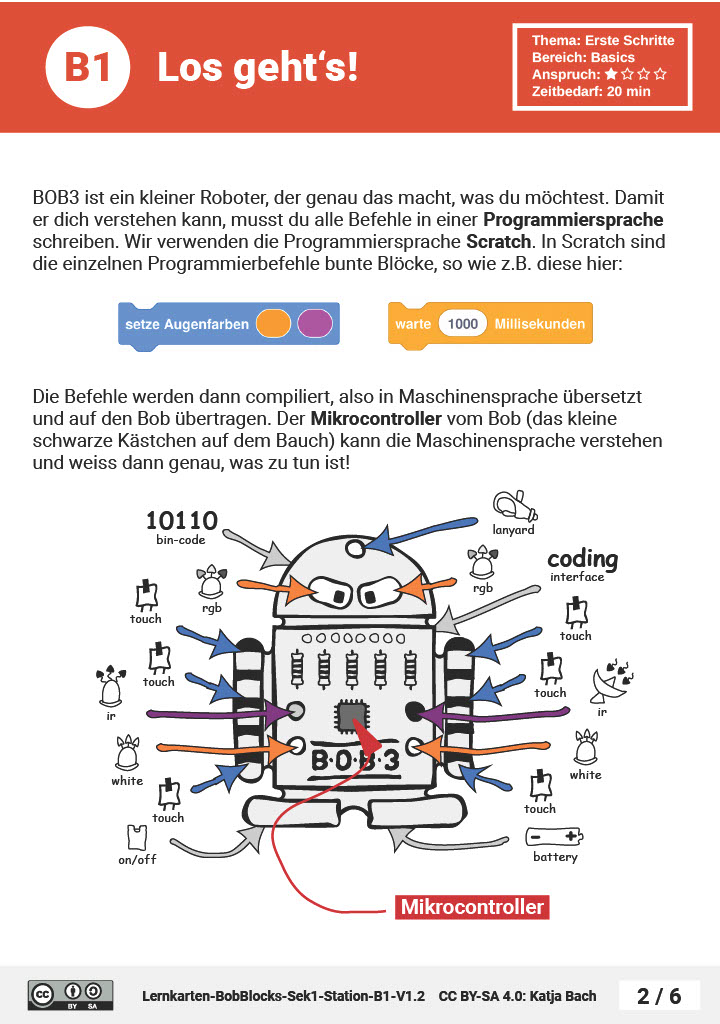
Der BOB3 ist ein kleiner, programmierbarer Roboter, der Kindern und Jugendlichen das Programmieren auf spielerische Weise näherbringt. Er kann erkennen, ob seine Arme berührt werden und sogar, an welcher Stelle oben, in der Mitte oder unten dies geschieht. Außerdem ist er in der Lage, andere BOB3-Roboter als Freunde zu erkennen, seine weißen Scheinwerfer einzuschalten, seine Augen in verschiedenen Farben blinken zu lassen und zwischen nahen und fernen Objekten zu unterscheiden. Der Roboter kann frei programmiert werden, eigene binäre Codes erhalten oder mit einer Knopfzelle und Lanyard als blinkendes Gadget um den Hals getragen werden.
Der BOB3 besteht aus mehreren wichtigen Bestandteilen: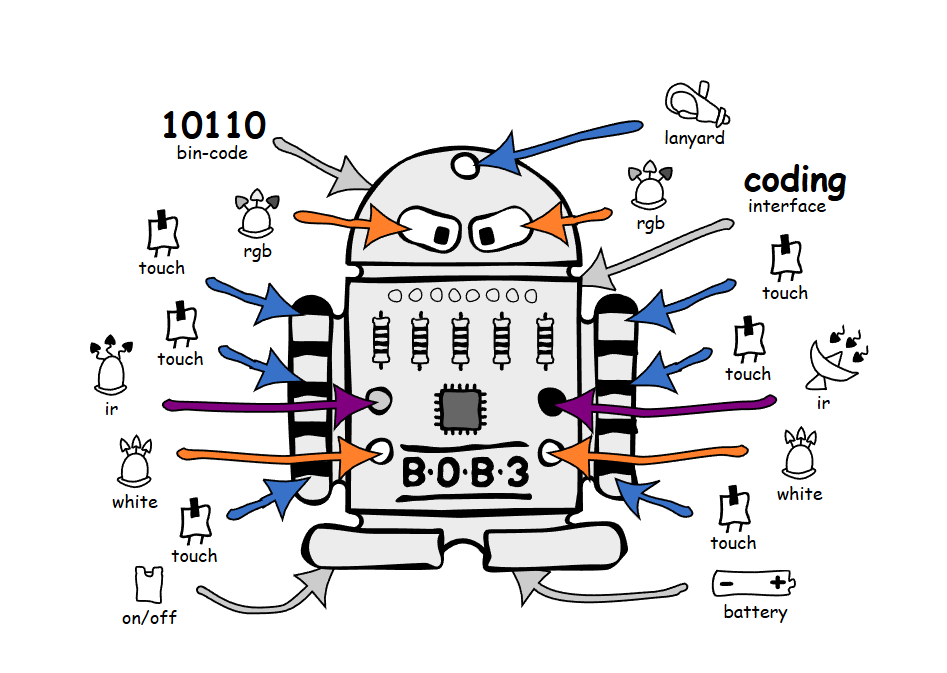
LEDs, Leuchtdioden
Der Roboter verfügt über zwei RGB-LEDs als Augen, die in allen Farben leuchten können, darunter rot, grün, blau, gelb, lila und viele weitere. Am Bauch befinden sich zwei superhelle weiße LEDs, die als Scheinwerfer dienen und den Roboter zum Beispiel als Taschenlampe nutzbar machen.
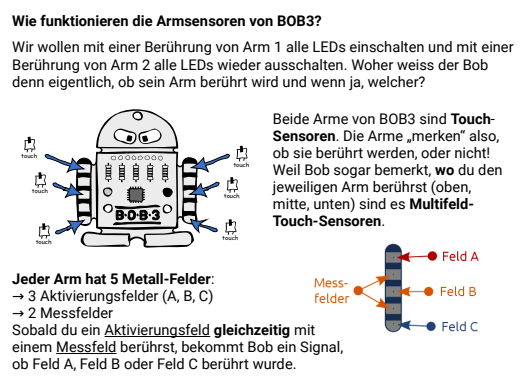
Multifeld-Touch-Sensoren
Beide Arme des BOB3 sind mit Touch-Sensoren ausgestattet, die erkennen, ob sie berührt werden. Dank der Multifeld-Technologie kann der Roboter sogar unterscheiden, an welcher Stelle der Arm berührt wird. Insgesamt verfügt er über sechs Tastsensoren, die angesteuert oder abgefragt werden können.
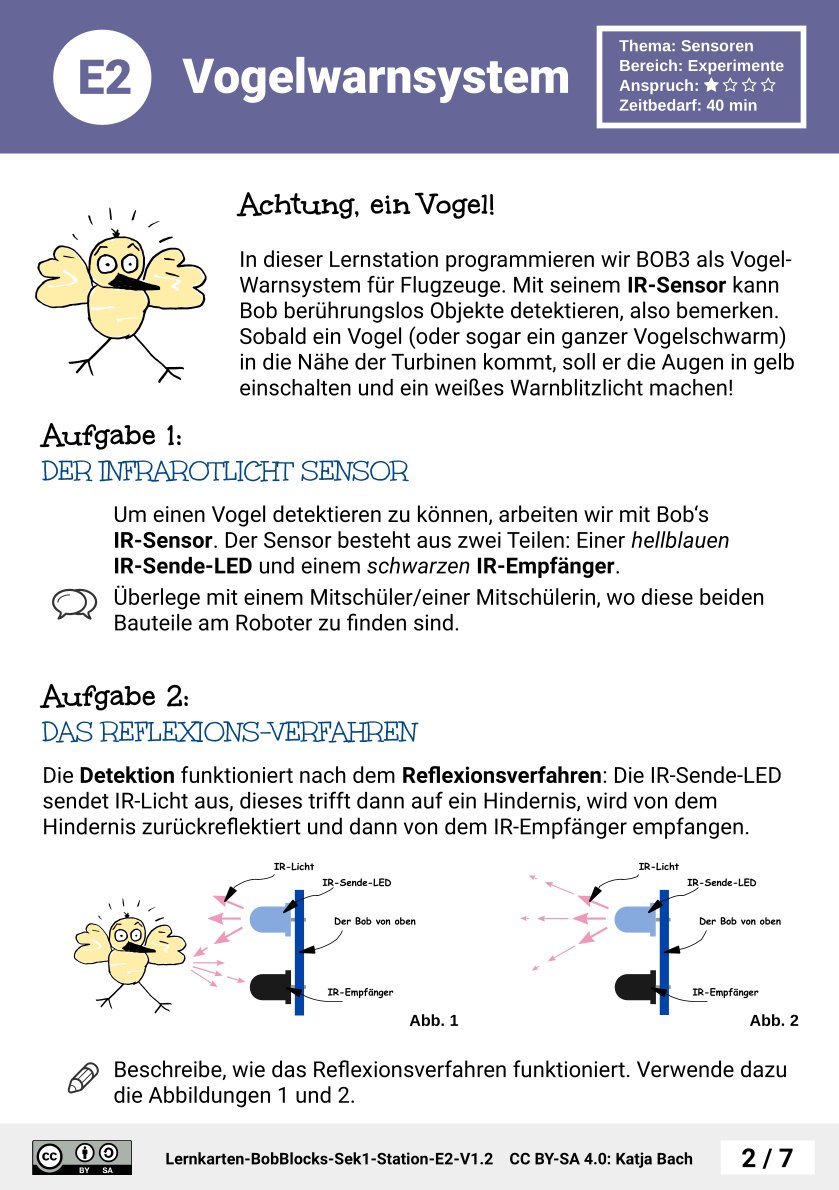
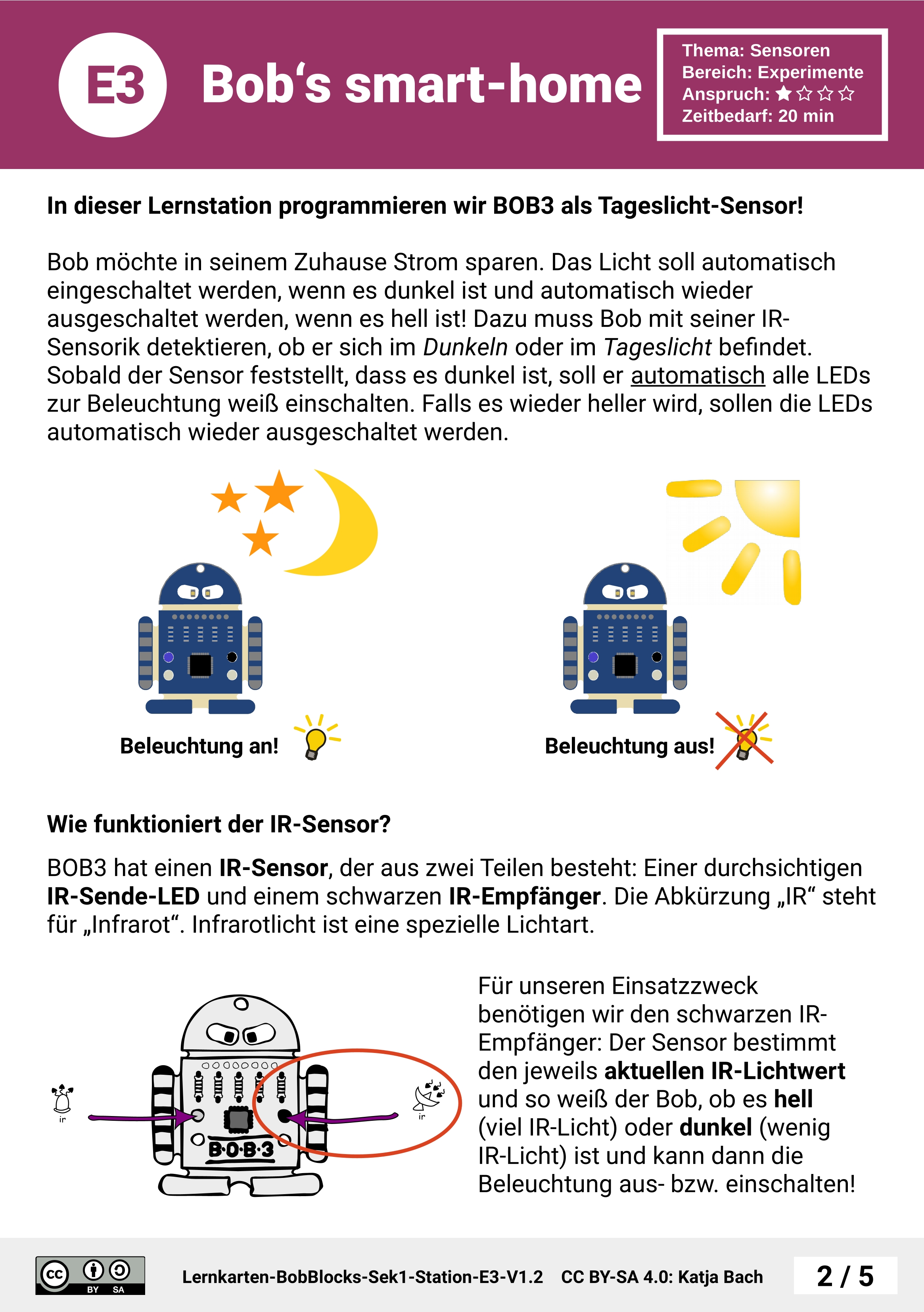
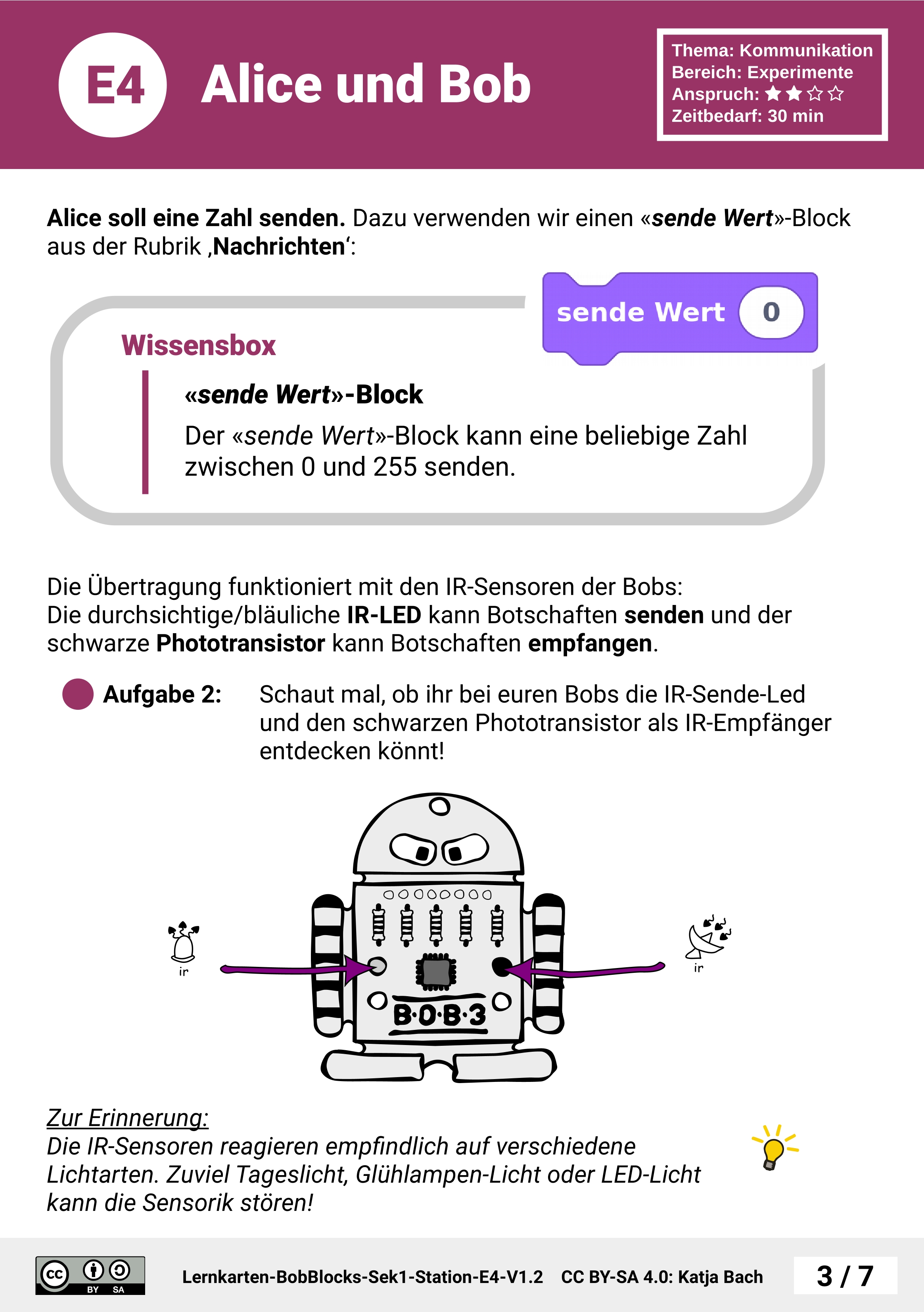
IR-Sensor
Der BOB3 besitzt einen Infrarot-Sensor, der aus einer violetten IR-Sende-LED und einem schwarzen IR-Empfänger besteht. Dieses System ermöglicht es dem Roboter, zwischen nahen und fernen Objekten zu unterscheiden, Hindernisse wie Hände oder Papier zu erkennen oder Nachrichten an andere BOB3-Roboter zu senden.
Mikrocontroller
Das Gehirn des BOB3 ist ein Mikrocontroller, der den Programmcode ausführt und die gesamte Elektronik steuert. Er bildet die zentrale Recheneinheit des Roboters und koordiniert alle Sensoren und Ausgabeelemente.
Im Digital.Point könen sie B-O-B-3 EduSets nutzen. In diesen finden sie jeweils 12 für Sie vorgebaute Roboter, durch den ProgBob-Programmier-Helm über ein USB-Kabel mit dem Computer mit Programmen bespielt werden können. 

Programme auf den BOB3 übertragen
Wenn sie die BOB3 mit den in den Boxen beigefügtem USB zu Micro-USB verbunden haben müssen sie nun die BobDude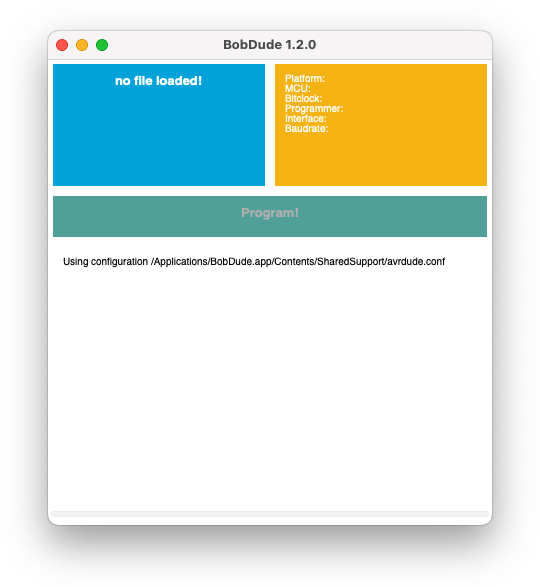 Software herunterladen. Wenn sie nun Programme über die App am IPad oder den Browser erstellt haben können sie diese herunterladen und dann über das blaue Feld im Programm abspielen.
Software herunterladen. Wenn sie nun Programme über die App am IPad oder den Browser erstellt haben können sie diese herunterladen und dann über das blaue Feld im Programm abspielen.
Windows-Installation:
In der folgenden Anleitung wird die manuelle Installation der BobDude Software unter Windows (treiberlos, ab Windows 10) beschrieben:
C:\Program Files\BobDude\bin\bobdude\orca_service.exe C:\Program Files\BobDude\bin\bobdude\bobdude.exe C:\Program Files\BobDude\bin\bobdude\bobdude.conf
SC.EXE CREATE "ORCA" binpath="C:\Program Files\BobDude\bin\bobdude\orca_service.exe" SC.EXE START "ORCA"
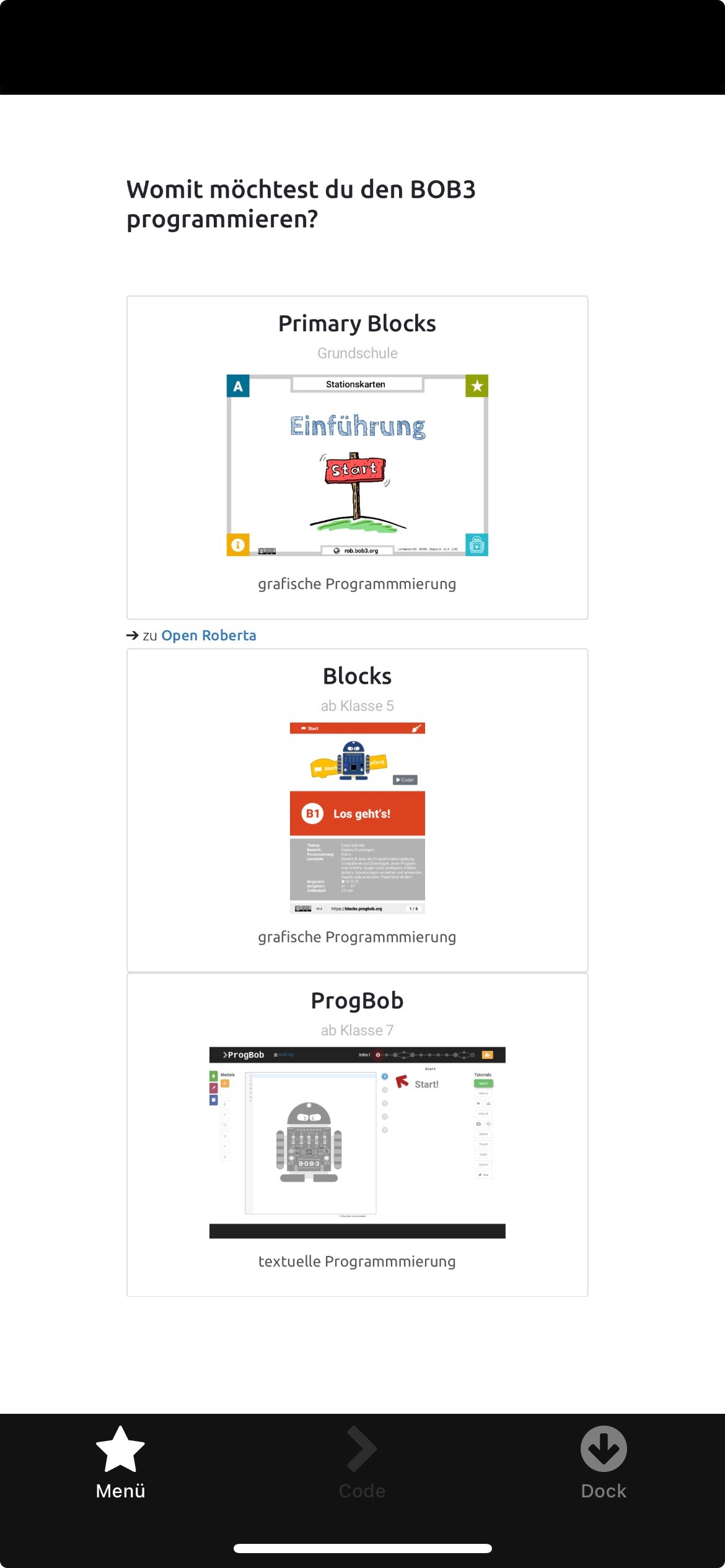
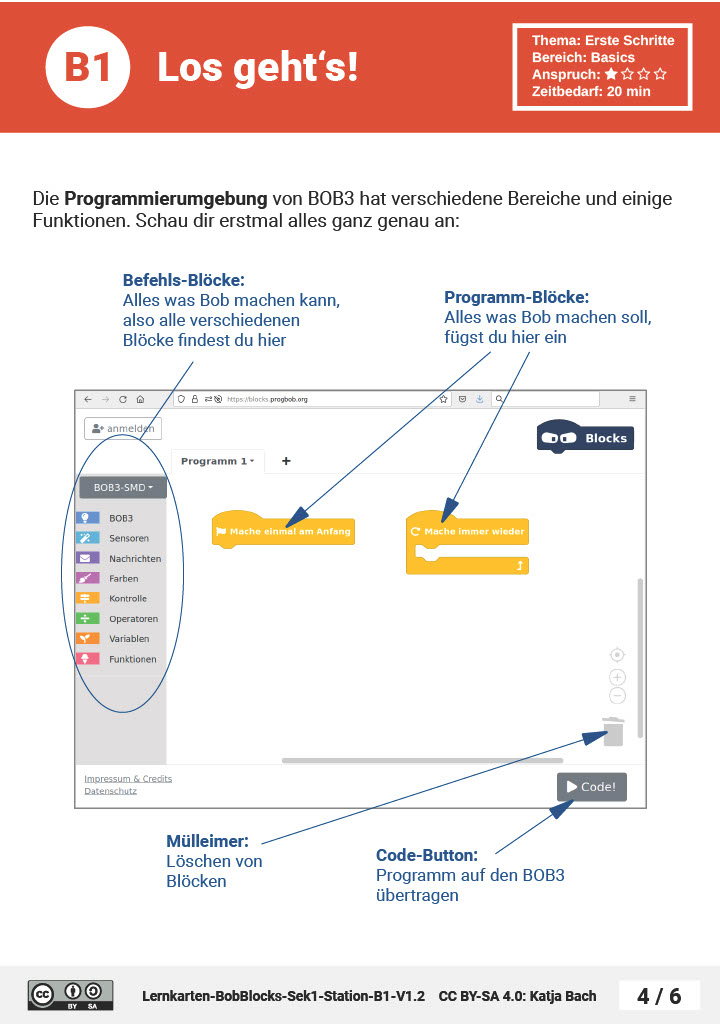
Programmieren in BOB Blocks
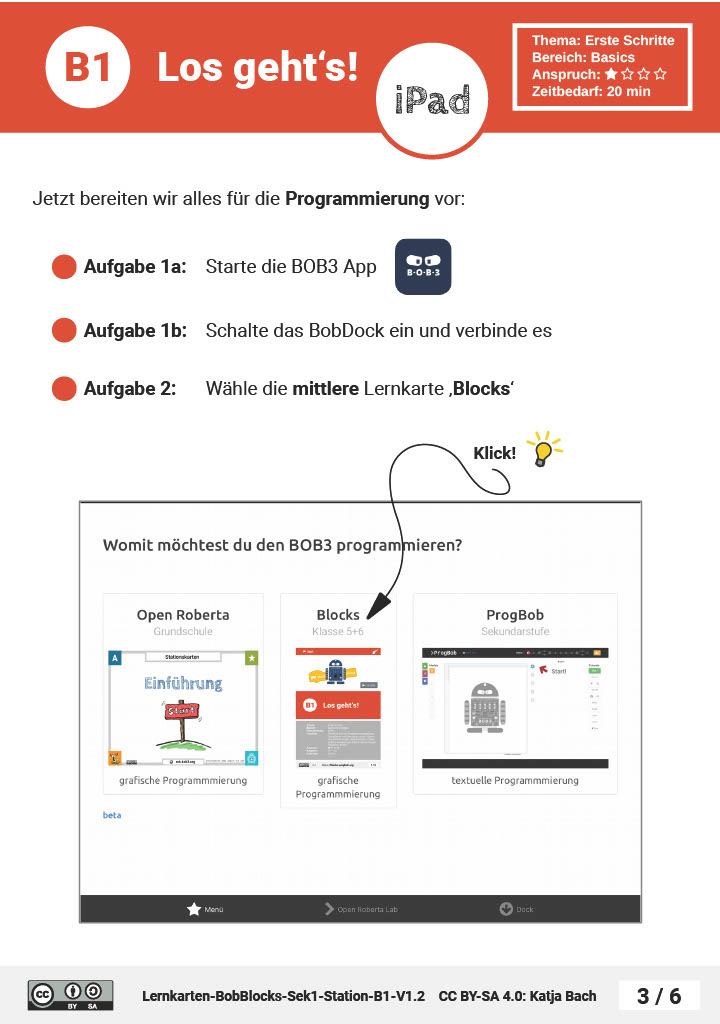
Der BOB3 lässt sich sehr einfach über die BOB3 App oder die Website programmieren. Für die im Digital.Point vorliegenden Materialien wird dabei mit BOB-Blocks gearbeitet. Wenn sie mit Schülern der Grundschule mit dem BOB 3 arbeiten möchten kann Primary-Blocks eine etwas vereinfachte Vorstufe von BOB-Blocks genutzt werden. Mit ProbBoB ist neben den beiden Visuellen Programmier Interfaces auch ein Textuelles Interface für den BOB 3 verfügbar, welches durch eine Interaktive Lerneinheit einen eigenständigen Übergang ins Code-Schreiben in C++ ermöglicht.
Öffnen sie nun die Website oder die App und machen sich mit der Umgebung vertraut.
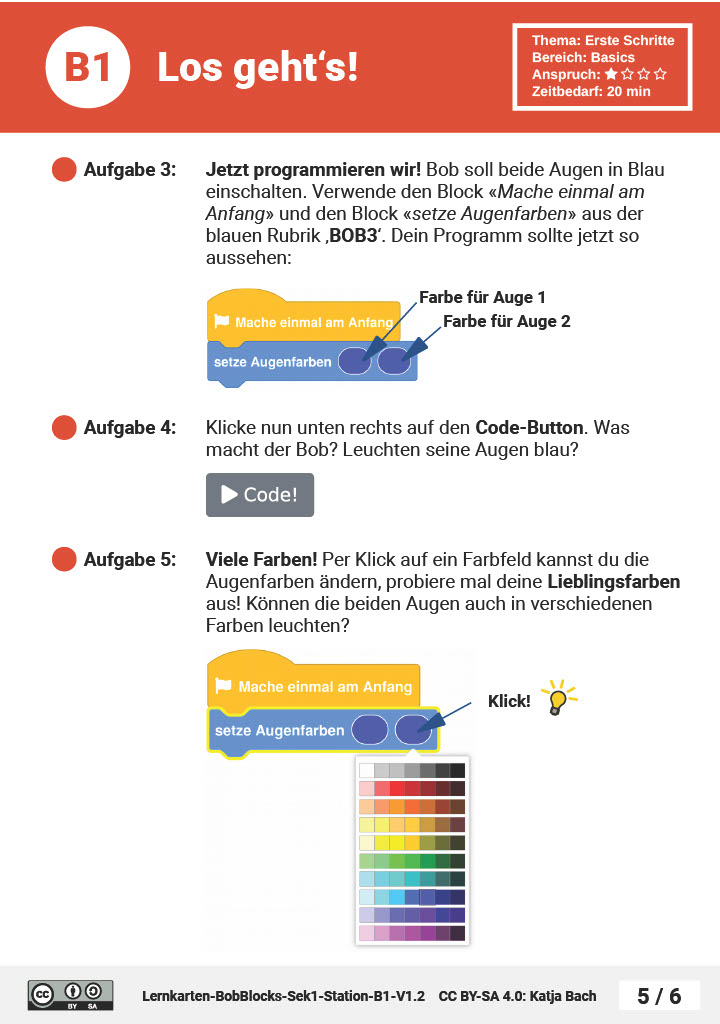
Unser erstes Programm:
Zunächst wollen wir erst einmal sprachlich beschreiben was unser Programm können soll:
- Wird das Programm gestartet leuchten die Augen des BOB3 in blau.
- Wird der Linke Arm des BOB3 berührt leuchten seine Augen in grün.
- Wird der rechte Arm des BOB3 berührt leuchten die Augen in rot.
- Wird der BOB3 nicht berührt wartet er 0,5 Sekunden und setzt dann die Augen wieder auf blau.
Aufgabe: Programmieren Sie ein Programm das genau diese Funktionen erfüllt.
Der Linke Arm wird als Arm1 bezeichnet und der rechte Arm bezeichnet den Arm2.
LÖSUNG
Zunächst überlegen wir uns, was unter den Mache am Anfang und was unter den Mache immer wieder Befehl gestellt werden muss.
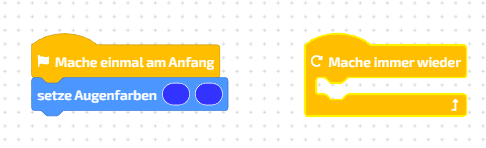
Mache am Anfang: Zu Beginn des Programms sollen die Augen auf blau gesetzt werden, darum nutzen wir das Puzzleteil: setzte Augen auf: und setzten es an den Mache am Anfang Befehl.

Mache immer wieder: Als nächstes wollen wir, dass es drei Zustände gibt:
- Der linke Arm wird berührt
- Der rechte Arm wird berührt
- kein Arm wird berührt
Nun gibt es viele unterschiedliche Möglichkeiten, wie wir diese Zustände einführen können. Zur Darstellung sollen an dieser Stelle zwei Möglichkeiten vorgestellt werden.
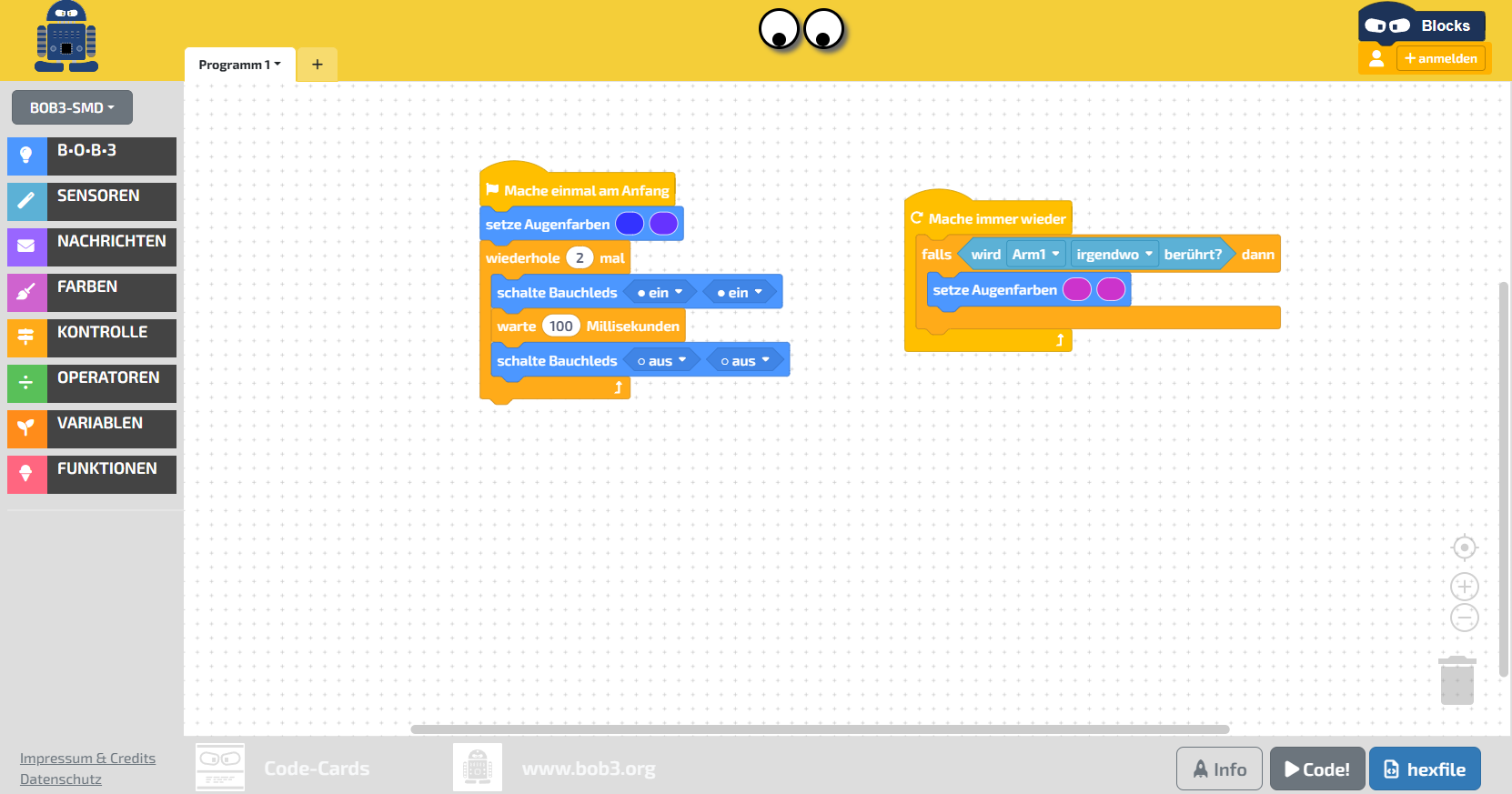
Version 1
|
Zunächst unterscheiden wir zwischen Befehlen, die nur beim Start ausgeführt werden sollen – also dem Setup des Programms und solchen, die kontinuierlich wiederholt werden, also im Loop. Für unser Programm wollen wir im Setup zu Beginn die Augen auf die Grundfarbe Blau einstellen. |
 |
|
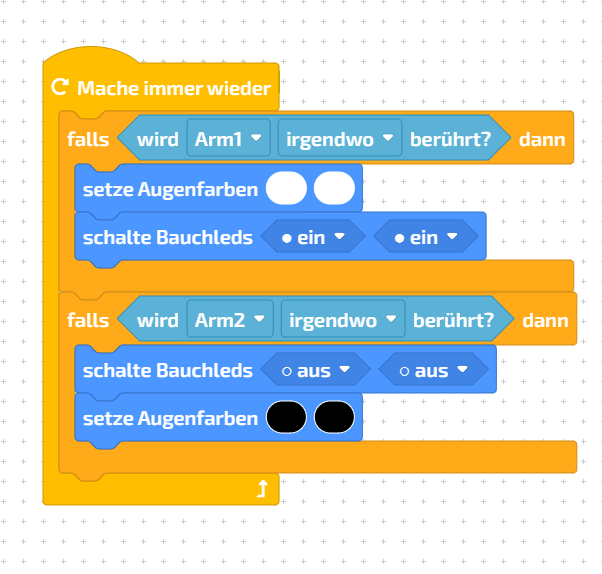
Zunächst wird im Loop die Grundstruktur des Programms erstellt. Dafür werden zwei Wenn–Sonst-Blöcke eingefügt: Einer soll später überprüfen, ob Arm1 etwas berührt, und der andere reagiert auf Berührungen von Arm2. |
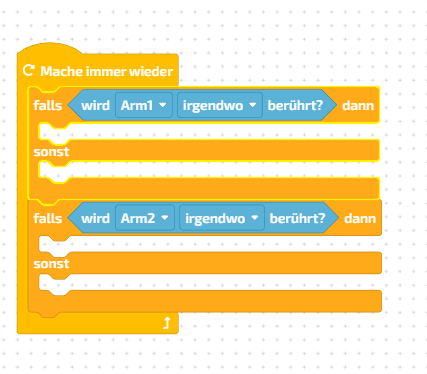 |
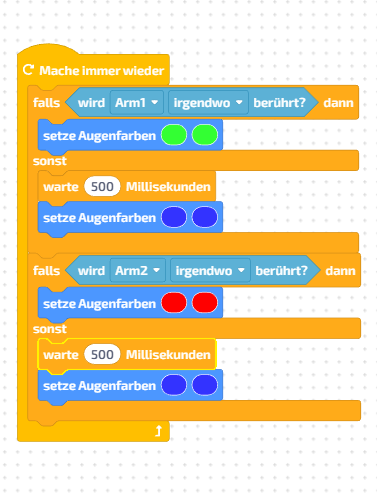
| Im nächsten Schritt wird diese Struktur mit Leben gefüllt. Wenn Arm1 etwas berührt, wechseln die Augenfarben des Roboters zu Grün. Wird Arm1 hingegen nicht berührt, wartet der Roboter kurz und setzt die Augen danach wieder auf Blau. Anschließend wird dasselbe für Arm2 umgesetzt: Bei einer Berührung leuchten die Augen Rot, und wenn keine Berührung erkannt wird, wartet der Roboter erneut kurz und stellt die Augen auf Blau zurück. Dadurch reagiert der Roboter kontinuierlich auf Berührungen seiner beiden Arme und zeigt diese deutlich über wechselnde Augenfarben an. |
|
Version 2
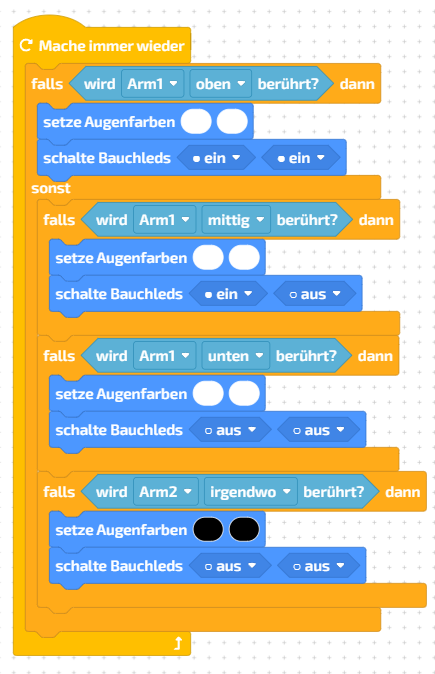
| Anstatt das Programm mit zwei If-Else-Schleifen aufzubauen, kann es auch mit drei If-Schleifen umgesetzt werden. Zunächst sollen die Armberührungen programmiert werden. Wenn der linke Arm berührt wird, leuchtet das Auge grün, wenn der rechte Arm berührt wird, leuchtet das Auge rot. | 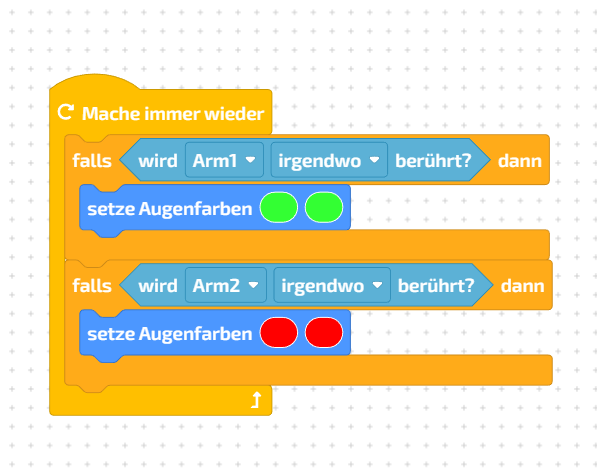 |
| Als letztes wird nun noch die Bedingung eingeführt, dass nichts berührt wird, dann schaltet es die Augen wieder auf blau und wartet auf einen neuen Input. | 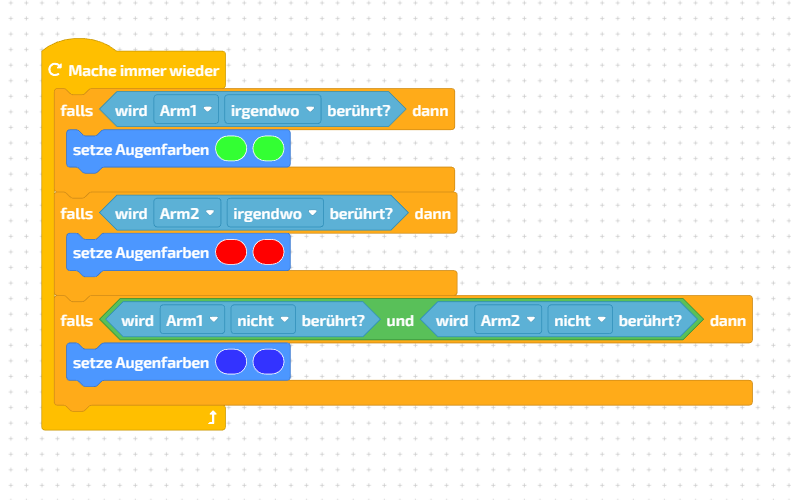 |
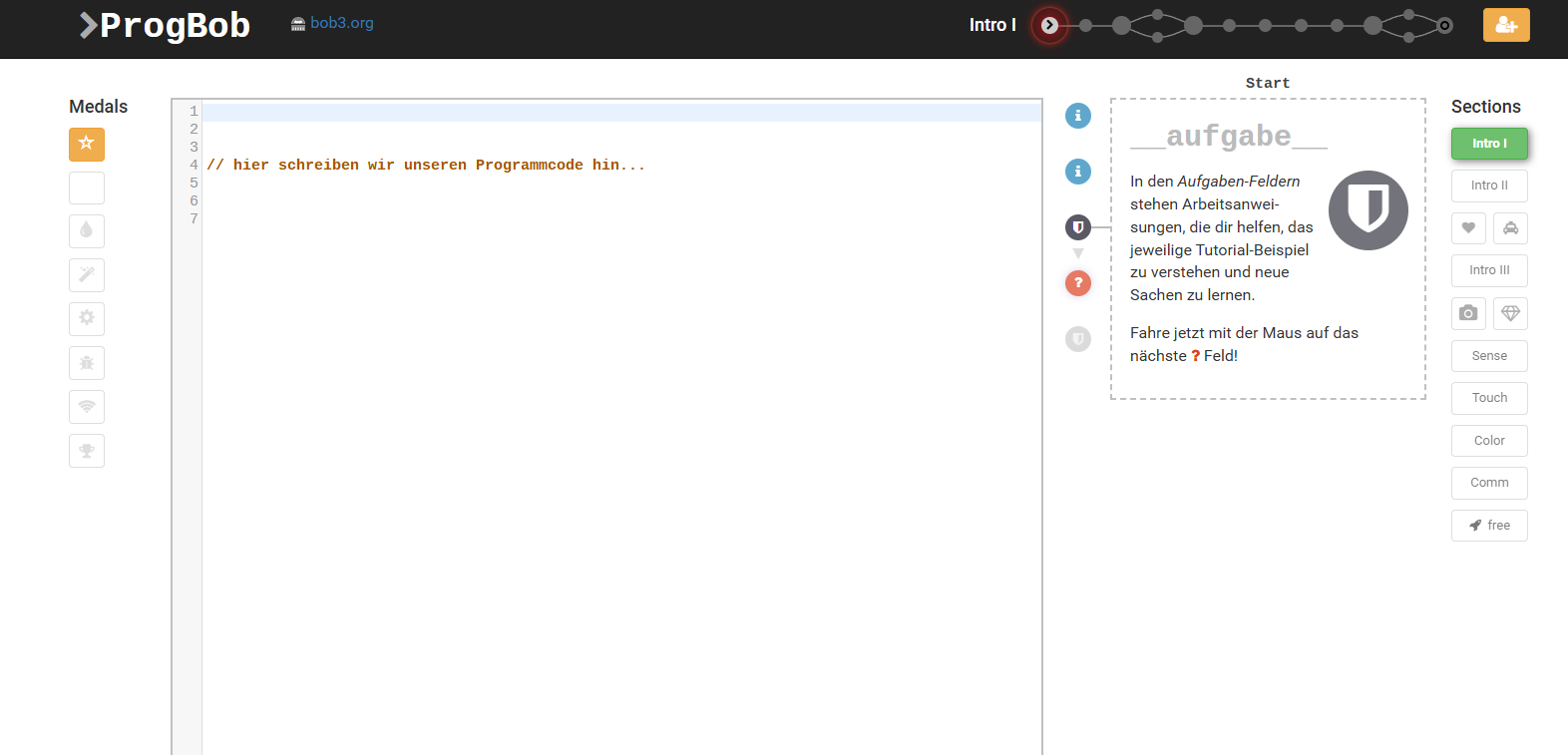
Textuelles Programmieren in Prog.Bob
Wenn nicht nur Visuell sondern auch textuell Programmiert werden soll kann der BOB3 über die Website: www.ProbBob.org auch mit Code programmiert werden. Wir wollen nun genau die selben Funktionen mit Code Programmieren. 
Um auf Prog.Bob programmieren zu können müssen sie zunächst das Intro l durchführen bevor sie ins freie Programmieren starten dürfen. Dies sollte ungefähr 20-30 Minuten dauern.
ProbBob Accounts können auch ohne E-Mail Adresse erstellt werden, erstellen sie für Ihre Klasse Accounts und Passwörter sodass der Fortschritt nicht verloren geht.
Mache einmal am Anfang wird im textuellen codieren zu setup. Mache immer wieder wird im Code als loop bezeichnet.
Aufgabe: Programmieren sie wieder ein Programm das die selben Anforderungen erfüllt.
TIPPS
Augen eine Farbe geben: bob3.setEyes(LINKS, RECHTS)
Berührungssensor am Arm: bob3.getArm(ARM (1,2))
LÖSUNG
#include <BOB3.h>
void setup() {
bob3.setEyes(BLUE, BLUE);
}
void loop() {
int links = bob3.getArm(1);
int rechts = bob3.getArm(2);
if (links != 0) {
bob3.setEyes(GREEN, GREEN);
} else if (rechts != 0) {
bob3.setEyes(RED, RED);
} else {
bob3.setEyes(BLUE, BLUE); // Standardfarbe
}
}
Übungsaufgabe für Lehrkräfte
Zuletzt soll der BOB3 einfache Rollen übernehmen, mit denen Sie ihren Schülern das nutzen des BOB3 zeigen können.
BOB3 als Leselicht:
Aufgabe: Die Augen und die LEDs des BOB`s sollen als Leselampe dienen. Der linke arm ist der "AN" Schalter der rechte Arm der "AUS" Schalter.
TIPPS
- Ein Auge auf Schwarz zu setzten schaltet es ab.
- der test ob der Arm berührt wird wird mit bob3.getArm(1,2) ausgeführt
LÖSUNG BLOCKS
LÖSUNG CODE
#include <BOB3.h>
void setup() {
// wird einmal beim Start ausgeführt
bob3.enableArms(true); // Arme aktivieren, damit Berührungen erkannt werden
}
void loop() {
// Arm 1 berührt?
if (bob3.getArm(1) > 0) {
bob3.setEyes(rgb(255,255,255), rgb(255,255,255)); // Augen weiß
bob3.setWhiteLeds(1, 1); // Bauch-LEDs an
}
// Arm 2 berührt?
if (bob3.getArm(2) > 0) {
bob3.setWhiteLeds(0, 0); // Bauch-LEDs aus
bob3.setEyes(rgb(0,0,0), rgb(0,0,0)); // Augen schwarz
}
}
BOB3 als dimmbare Taschenlampe
Aufgabe: Als nächstes soll die Lampe nicht nur ein und ausgeschaltet werden können sondern auch die Intensität des Lichts angepasst werden. Dafür soll die Anzahl der leuchtenden Lampen 0-4 eingestellt werden können.
TIPPS
LÖSUNG BLOCKS
LÖSUNG CODE
#include <BOB3.h>
void setup() {
}
void loop() {
int Links = bob3.getArm(1);
int Rechts = bob3.getArm(2);
// Links steuert LEDs
if (Links == 1) {
bob3.setEyes(WHITE, WHITE);
bob3.setWhiteLeds(ON, ON);
} else if (Links == 2) {
bob3.setEyes(WHITE, WHITE);
bob3.setWhiteLeds(ON, OFF);
} else if (Links == 3) {
bob3.setEyes(WHITE, WHITE);
bob3.setWhiteLeds(OFF, OFF);
}
// Rechts überschreibt evtl. Links
if (Rechts != 0) {
bob3.setEyes(OFF, OFF);
bob3.setWhiteLeds(OFF, OFF);
}
delay(50); // kleine Pause, um zu flackern zu vermeiden
}
BOB3 als Alarmanlage
In dieser letzten Aufgabe wollen wir den BOB3 zur Alarmanlage programmieren.
Aufgabenbeschreibung:
Programmiere den BOB3-Roboter so, dass er als kleine Alarmanlage funktioniert:
-
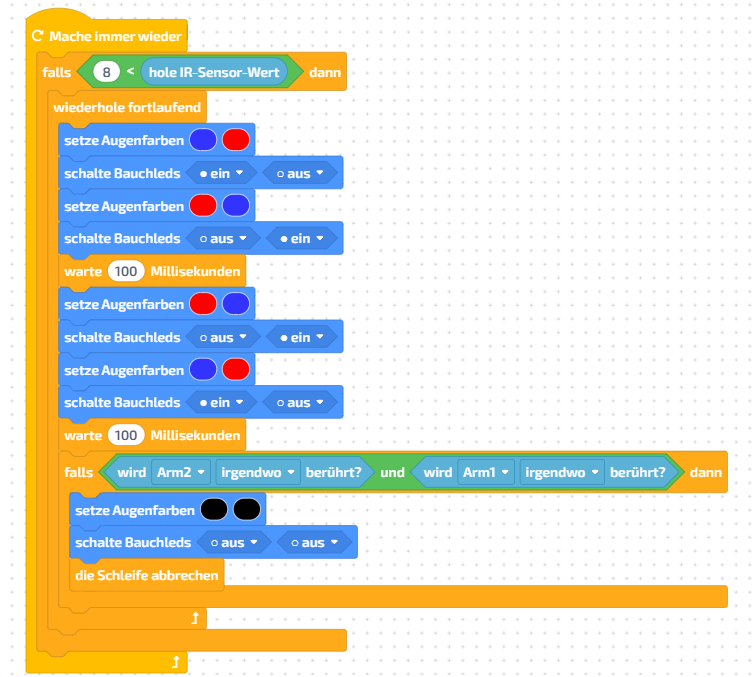
Auslösen: Sobald der IR-Sensor eine Annäherung erkennt (Wert > 8), startet ein blinkendes LED-Muster über die Augen- und weißen LEDs.
-
Signal: Das Muster soll auffällig und rhythmisch blinken, um eine Alarmreaktion zu simulieren.
-
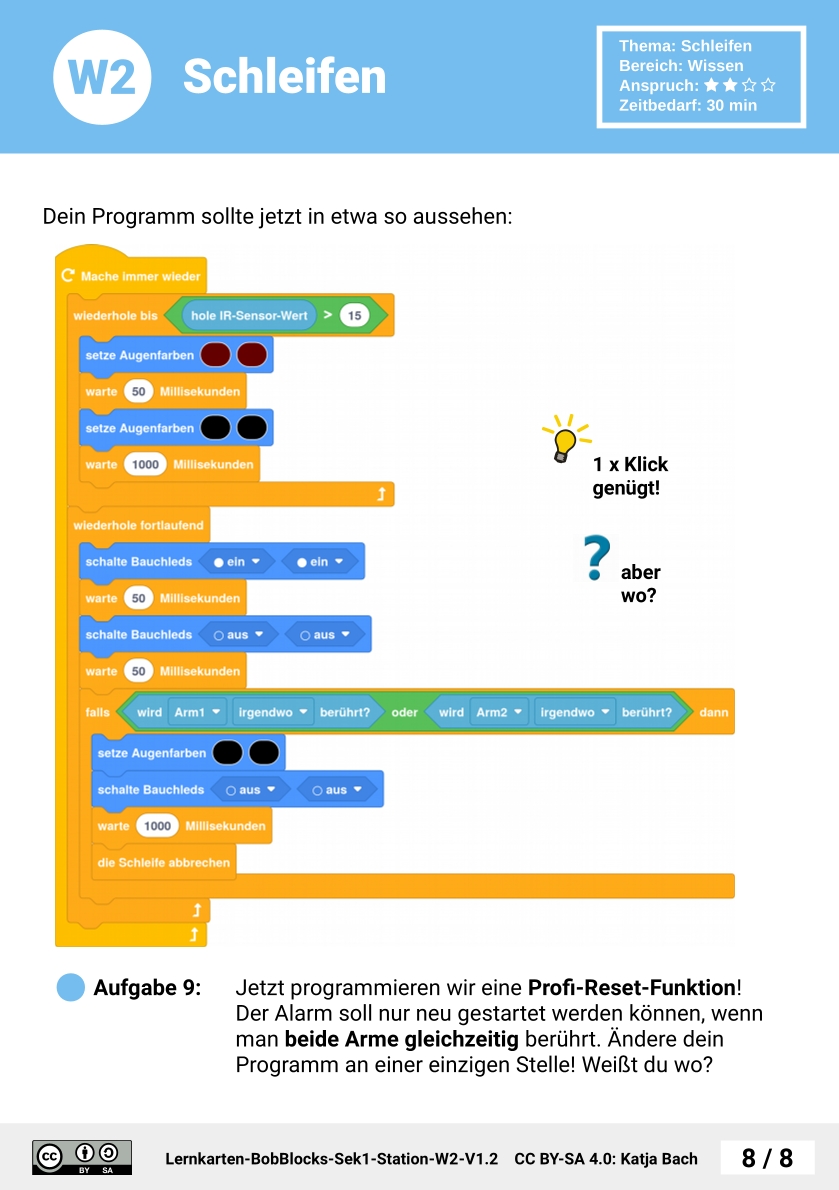
Deaktivieren: Das Blinkmuster endet erst, wenn beide Arme des Roboters gleichzeitig bewegt werden (Profi-Reset).
-
Pause: Nach dem Stoppen des Signals wartet der Roboter kurz, bevor er wieder auf neue Annäherungen reagiert.
TIPPS
- LEDs steuern mit
bob3.setEyes(FarbeLinks, FarbeRechts)undbob3.setWhiteLeds(links, rechts). - Sensoren abfragen mit
bob3.getIRSensor()undbob3.getArm(1/2), um Auslösen und Stoppen zu kontrollieren.
LÖSUNG BLOCKS
LÖSUNG CODE
#include <BOB3.h>
void loop() {
if (bob3.getIRSensor() > 8) {
while (true) {
bob3.setEyes(ORANGE, OFF);
bob3.setWhiteLeds(ON, ON);
delay(50);
bob3.setEyes(OFF, OFF);
bob3.setWhiteLeds(OFF, OFF);
delay(50);
bob3.setEyes(OFF, ORANGE);
bob3.setWhiteLeds(ON, ON);
delay(50);
bob3.setEyes(OFF, OFF);
bob3.setWhiteLeds(OFF, OFF);
delay(50);
// Profi-Reset-Funktion über Armbewegung
int Links = bob3.getArm(1); // Arm 1 abfragen
int Rechts = bob3.getArm(2); // Arm 2 abfragen
if (Links != 0 && Rechts != 0) { // beide Arme aktiv
break; // Schleife verlassen
}
}
delay(2000);
}
}
Wir freuen uns, dass Sie unseren Crashkurs genutzt haben. Nutzen Sie nun Ihr Wissen, um spannende und kreative Stunden mit Ihren Schülern im Digital.Point zu gestalten. Viel Erfolg und viel Freude beim Ausprobieren!
Ihr Digital.Point Team
2.2.2 Unterrichtseinheiten
Lernstationsarbeit bis Klasse 6
Dies ist die Lernstationsarbeit des Herstellers. Informationen und Materialien sind in dieser Form übernommen.
 Die Einführung (Lernstation A)
Die Einführung (Lernstation A)
Die Bearbeitung der Lernstation A ist die Voraussetzung für alle anderen Lernstationen und sollte somit von allen Schülerinnen und Schülern als Erstes bearbeitet werden! In dieser Station lernen die SuS zunächst die grundlegende Bedienung der Open Roberta Oberfläche und die Übertragung der Programme auf den BOB3. Später lernen sie erste Befehlsblöcke zur Veränderung der Farbe der Augen kennen und verwenden diese.
Schwierigkeitsgrad: Einfach
Zeitbedarf: ca. 20–40 Minuten
Material:
Polizeiblinklicht (Lernstation B) 
Zeitbedarf: ca. 15–30 Minuten
Material:
Taschenlampe (Lernstation C)
Zeitbedarf: ca. 15–30 Minuten
Material:
Regenbogen (Lernstation D)
Zeitbedarf: ca. 15–30 Minuten
Material:
Alarmanlage (Lernstation E) 
Zeitbedarf: ca. 30–60 Minuten
Material:
Zufall (Lernstation F)
Zeitbedarf: ca. 30–60 Minuten
Material:
Würfel (Lernstation G) 
Zeitbedarf: ca. 45–90 Minuten
Material:
Foto-Bob (Lernstation H) 
Zeitbedarf: ca. 45–90 Minuten
Material:
Offene Stationen
Ampel (Lernstation I) 
Zeitbedarf: ca. 45–90 Minuten
Material:
Baustellenlicht (Lernstation J) 
Zeitbedarf: ca. 45–90 Minuten
Material:
Klassen 9-10 Textbasiertes Programmieren.
Für Schülerinnen, die statt mit Blocks textbasiert programmieren wollen und können, steht für den B-O-B-3 das ProgBob-Interface bereit. In diesem können Schülerinnen ihre Kenntnisse in einer an C bzw. C++ orientierten Programmiersprache erweitern und dabei die Funktionen des B-O-B-3 kennenlernen. Dabei kann es hilfreich sein, den Roboter zuvor mit Blocks kennengelernt zu haben, ist aber nicht notwendig. Vom Hersteller steht eine auf sechs mal 45 Minuten ausgelegte Unterrichtseinheit mit einer Einführung ins Programmieren zur Verfügung, die Sie auch in der Digital.Library finden können. In dieser auf das Wesentliche verkürzten Version dieses Kurses lernen die SuS zunächst den Bot und seine Bestandteile kennen, erstellen sich dann einen ProgBob-Account und arbeiten anschließend selbstständig mit Laptop und B-O-B-3 in der interaktiven Lerneinheit.
Benötigtes Material:
- -Genügend B-O-B-3 Roboter
- -Laptops mit der BobDude Programm zum bespielen der B-O-B-3
Der B-O-B-3 Roboter
Programmieren mit ProgBob
Um programmieren zu können, braucht man immer eine Programmiersprache und eine Umgebung. Für den B-O-B-3 ist die Sprache eine eigene Version der Programmiesprache C bzw C++, die Umgebung wird ProgBob genannt. Ihr findet sie unter folgendem Link: https://www.progbob.org/Als Erstes müsst ihr euch einen Account erstellen. Diesen benötigt ihr, damit ihr eure Fortschritte speichert und beim nächsten Mal genau dort weitermachen könnt, wo ihr aufgehört habt. Um die Zugangsdaten nicht zu vergessen, schreibt sie hier auf:
User: ________________________
Code: _______________________
Nun startet ihr direkt in das Intro und macht euch damit vertraut. Wenn ihr an einem Punkt seid, an dem ein Programm erstellt (compiliert) werden soll, drückt den Compile-Knopf. Anschließend erhaltet ihr eine B-O-B-3-Datei. Ladet diese über Bob-Dude auf euren B-O-B-3 und probiert das Programm aus.
Das war’s schon! Viel Spaß mit der interaktiven Lerneinheit.
2.2.3 Materialisten und Handouts
Materialiste BOB 3
In Jeder unserer B-O-B-3 Kisten sind :
-
12 BOB 3 Roboter
-
12 ProgBOB USB-Adapter mit USB Kabel
-
1 Lehrhandreichung
-
Modulbeschreibungen 1, 2 und 3
-
Kopiervorlagen mit Lösungen
2.2.4 Öffentliche Dokumente und Links
Für den BOB3 Roboter stehen von Hersteller einige Unterrichtsmaterialien zur Verfügung
Legende für Arbeitsblätter:
B = Basisinformationen
W= Wissen
E= Experiment
Das Arbeitsblatt: Klassen 5-6 E1 Taschenlampe ist also ein Experiment für die Klassenstufen 5-6 und es wird dabei der BoB als Taschenlampe genutzt.
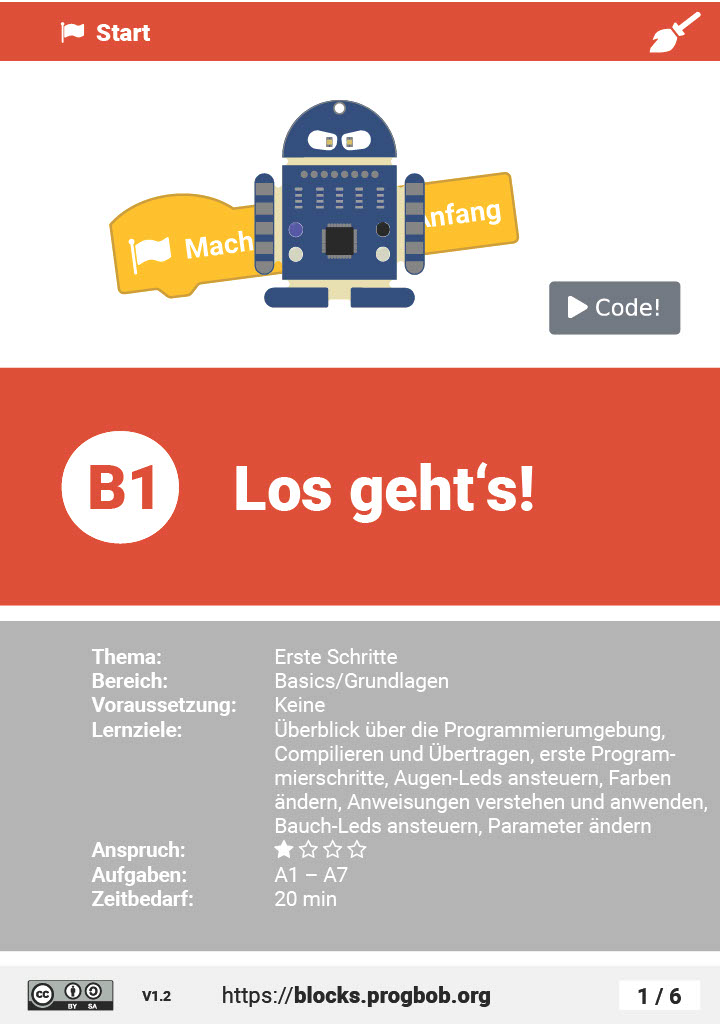
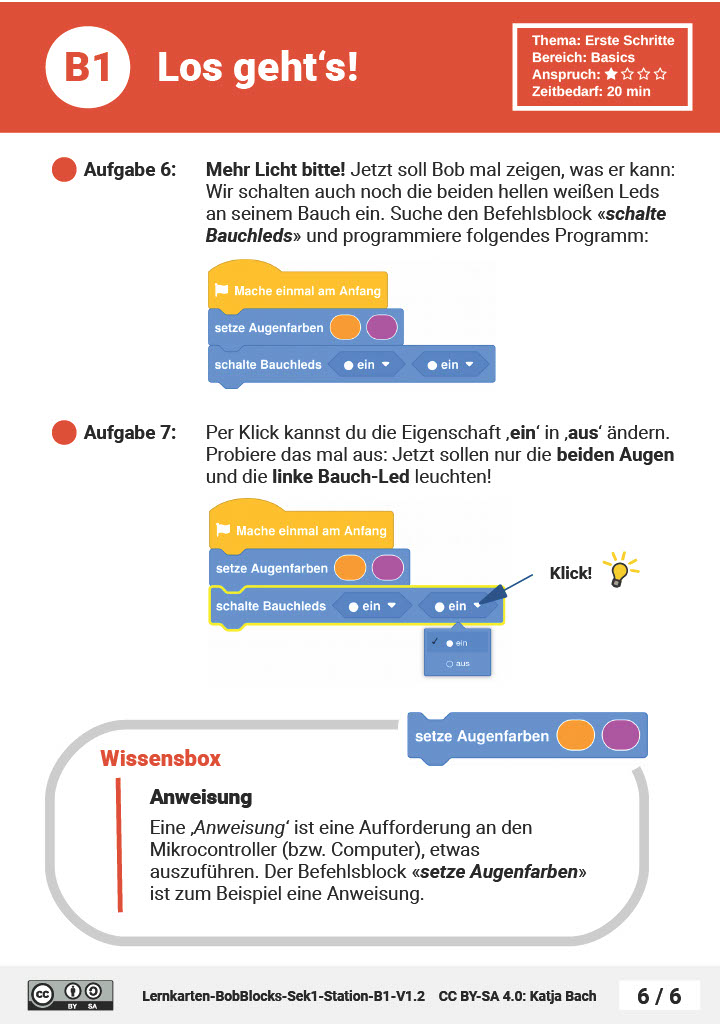
Klasse 5-6 B1 - Los geht's!
B1 - Los geht's!
Der Start
Bereich: Basics/Grundlagen
Lernziele: Überblick über die Programmierumgebung, Compilieren und Übertragen, erste Programmierschritte, Augen-Leds ansteuern, Farben ändern, Anweisungen, Bauch-Leds ansteuern, Parameter ändern
Anspruch: Einfach
Aufgaben: A1-A5
Zeitbedarf : ca. 20 Minuten
Download als PDF
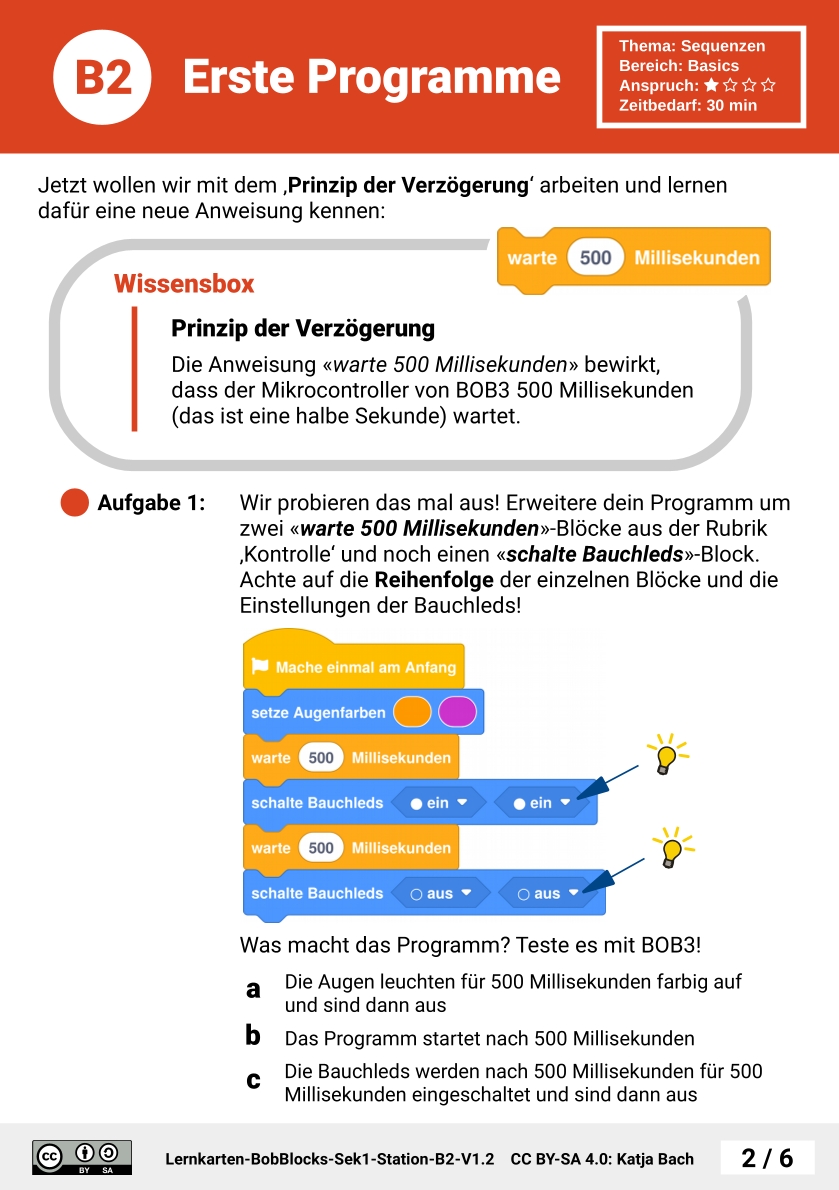
Klasse 5-6 B2 - Erste Programme
![]()
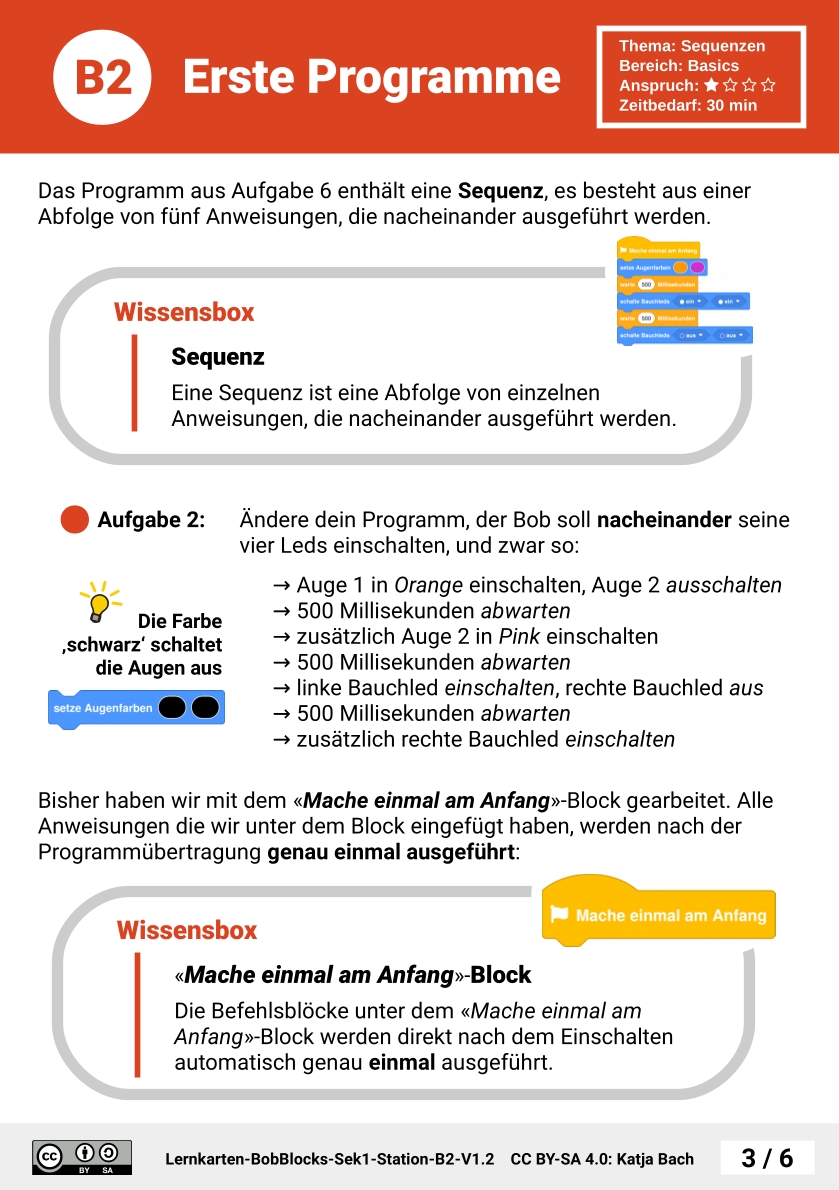
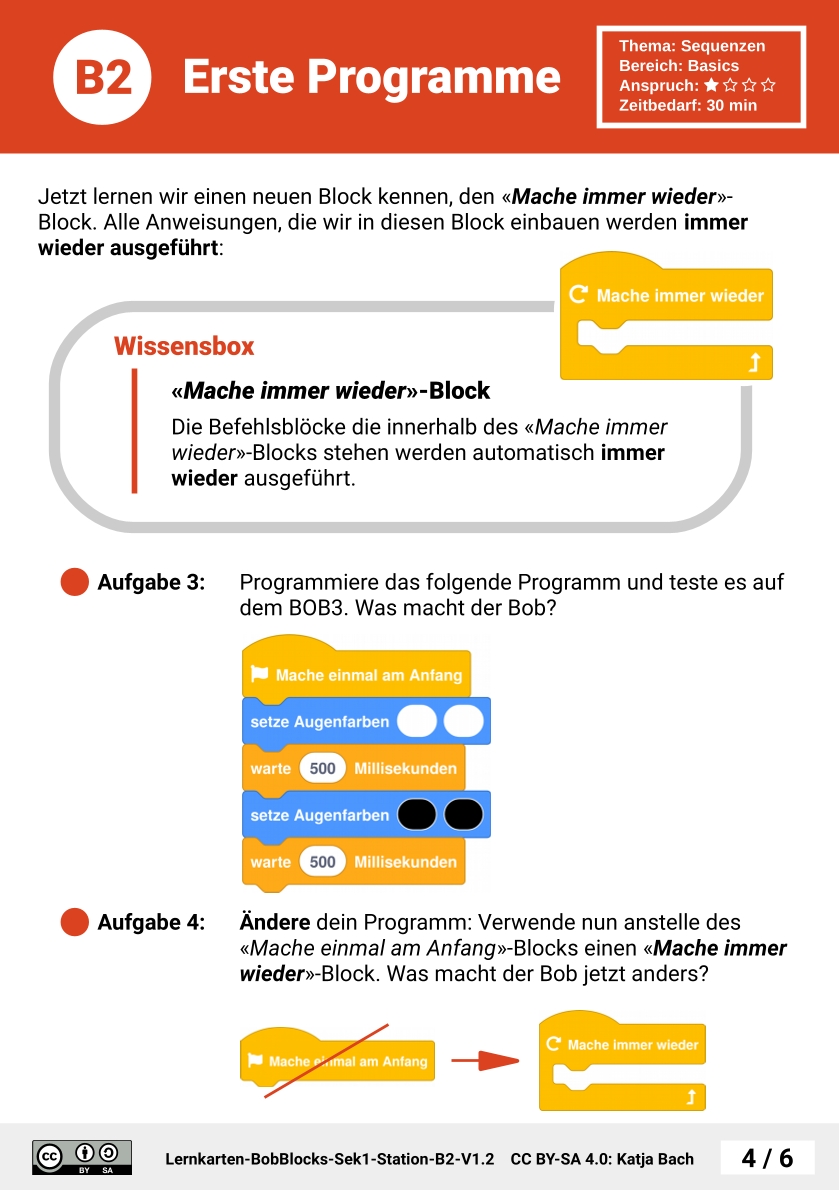
B2 - Erste Programme
Sequenzen
Bereich: Basics/Grundlagen
Lernziele: Erste eigene Programme, Sequenzen, Prinzip der Verzögerung, «Mache immer wieder»-Block, Blinklichter erzeugen, Varianten entwickeln
Anspruch: Einfach
Aufgaben: A1-A10
Differenzierung: A11+A12
Zeitbedarf : ca. 30 Minuten

Download als PDF
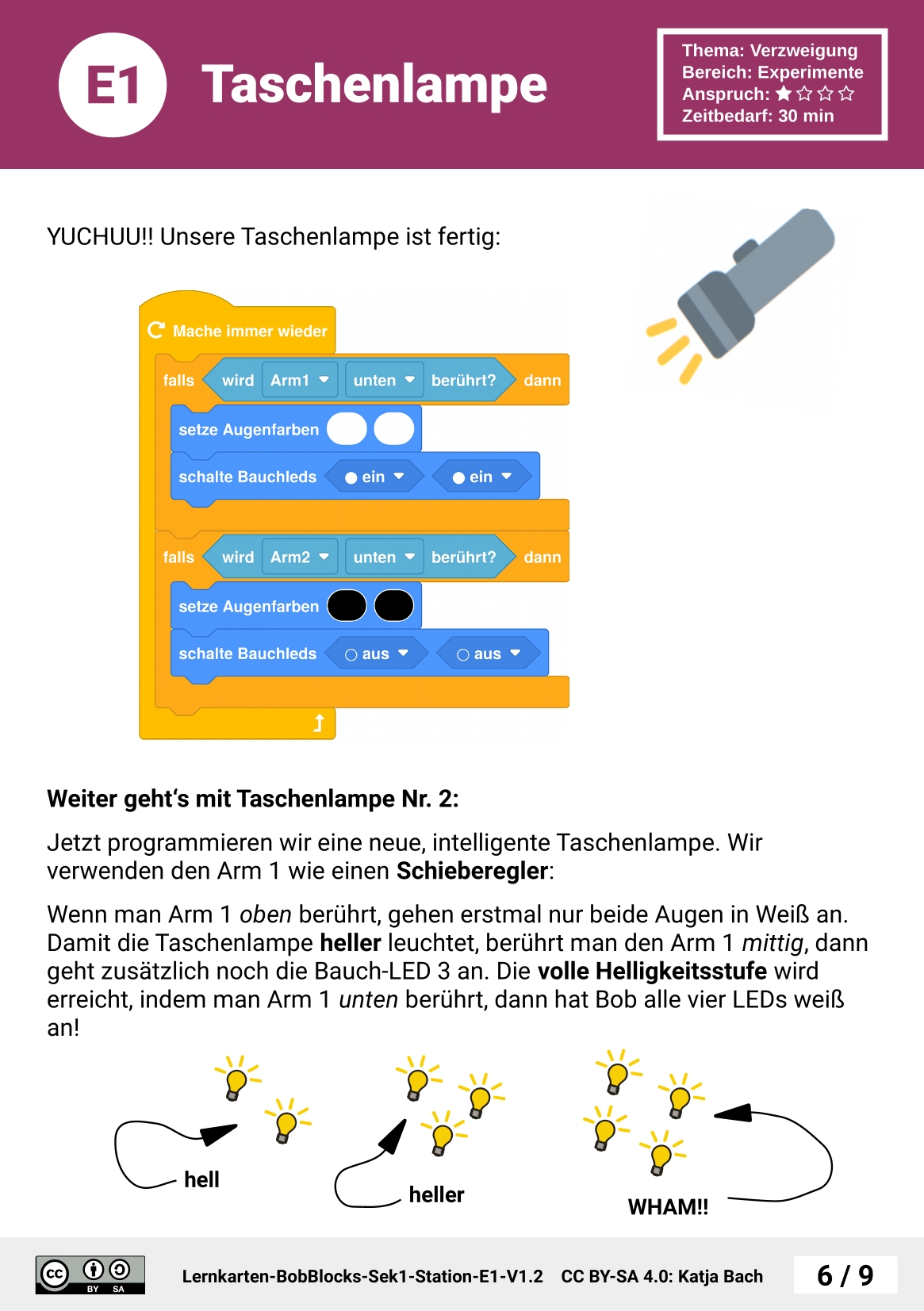
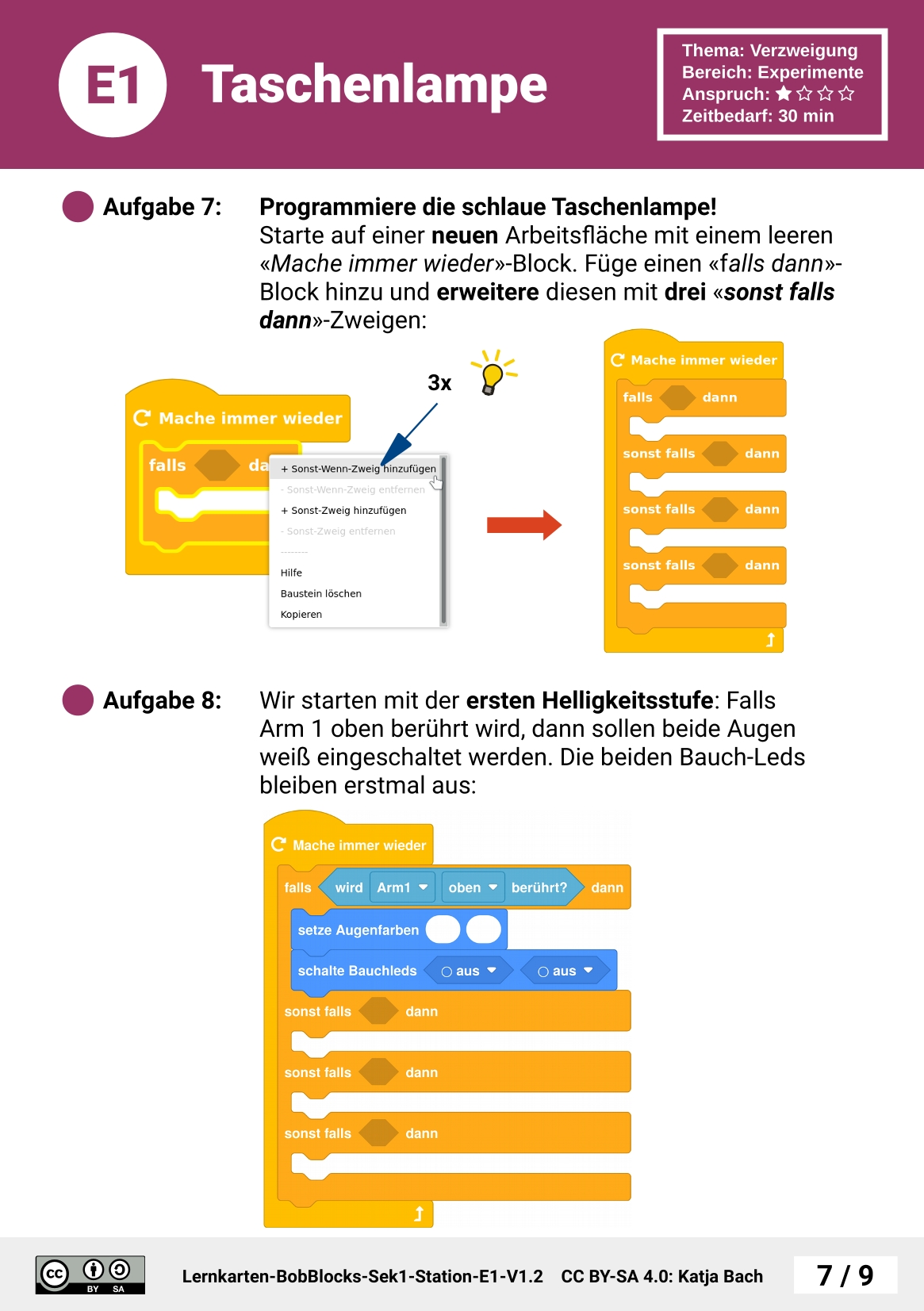
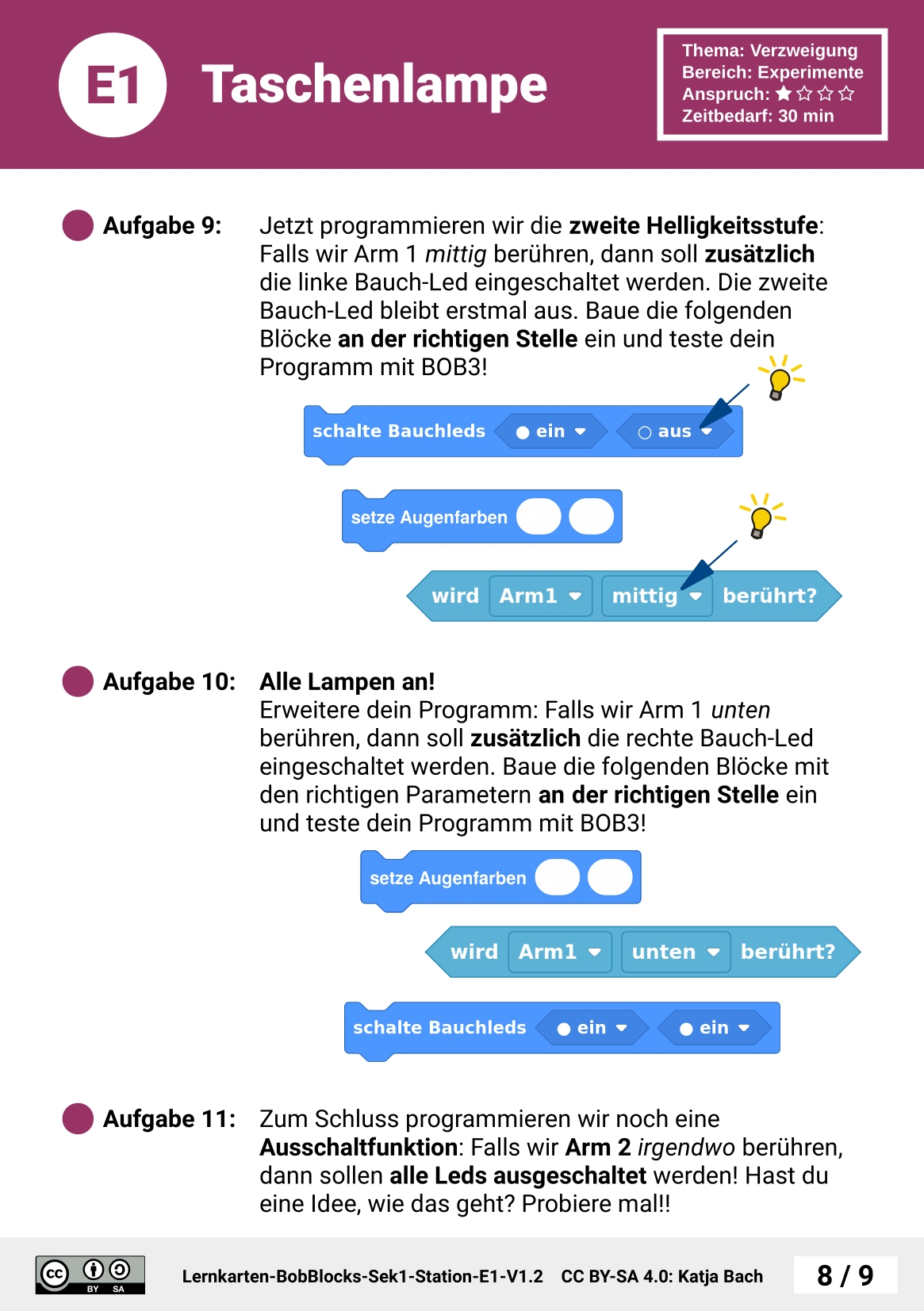
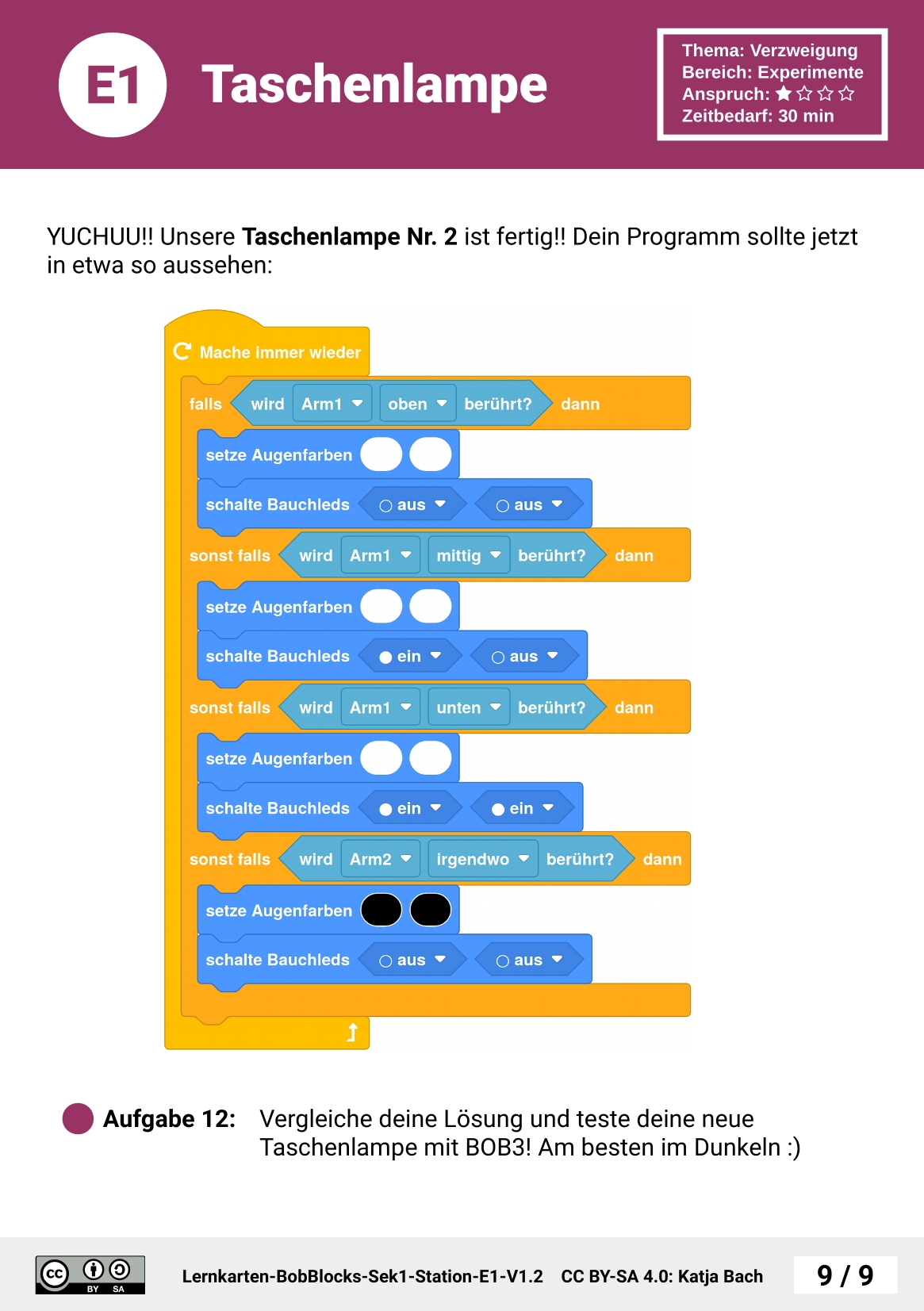
Klasse 5-6 E1 - Taschenlampe
E1 - Taschenlampe
Mehrfachverzweigung und Touch-Sensoren
Bereich: Wissen
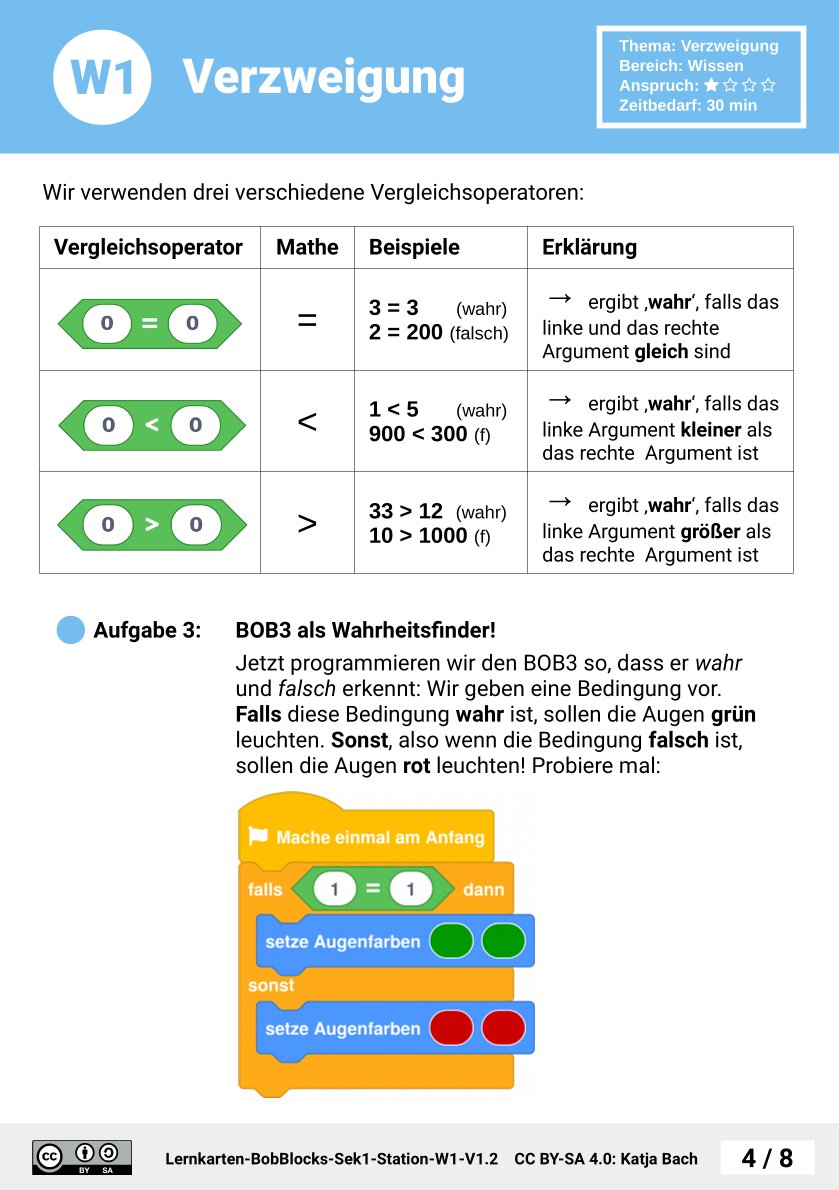
Lernziele: Bedeutung und Anwendung von Verzweigungen, Vergleichsoperatoren, Wahrheitswerte, «falls-dann»-Block
Anspruch: Einfach
Aufgaben: A1-A12
Zeitbedarf : ca. 30 Minuten
Download-PDF



Download-PDF
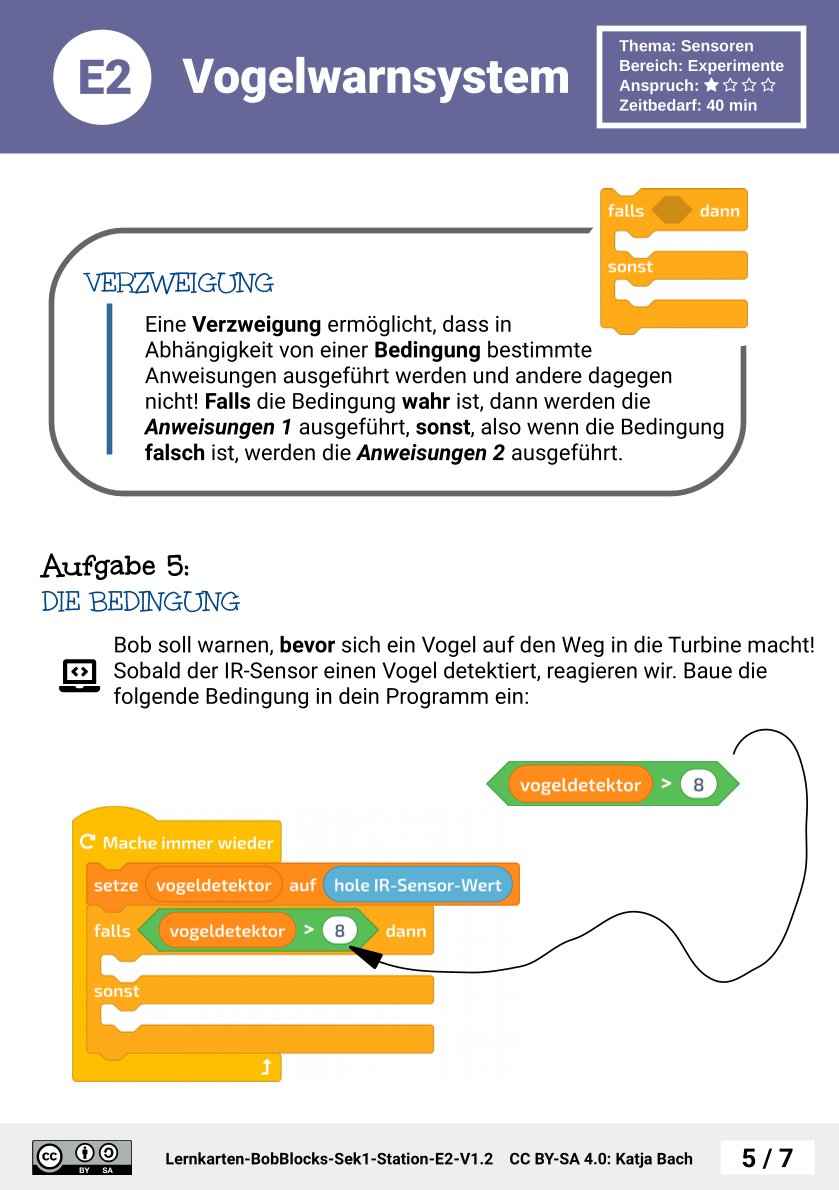
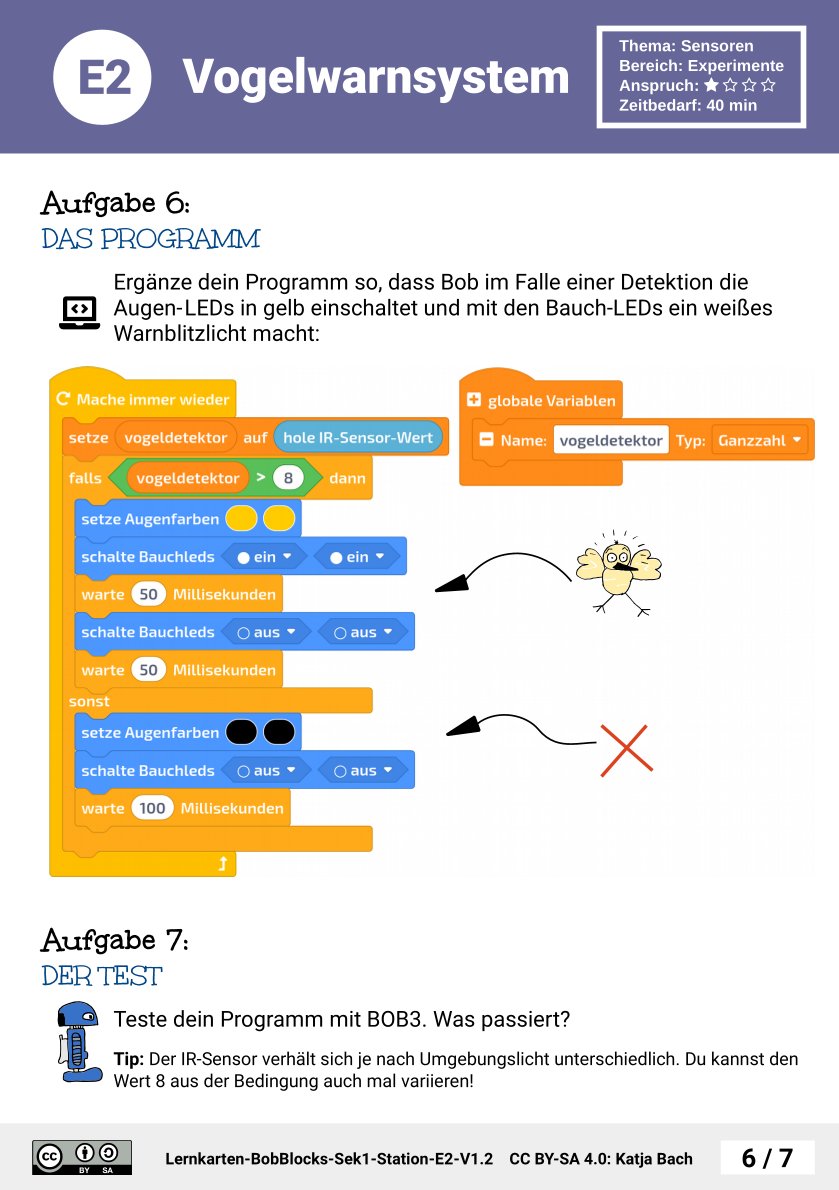
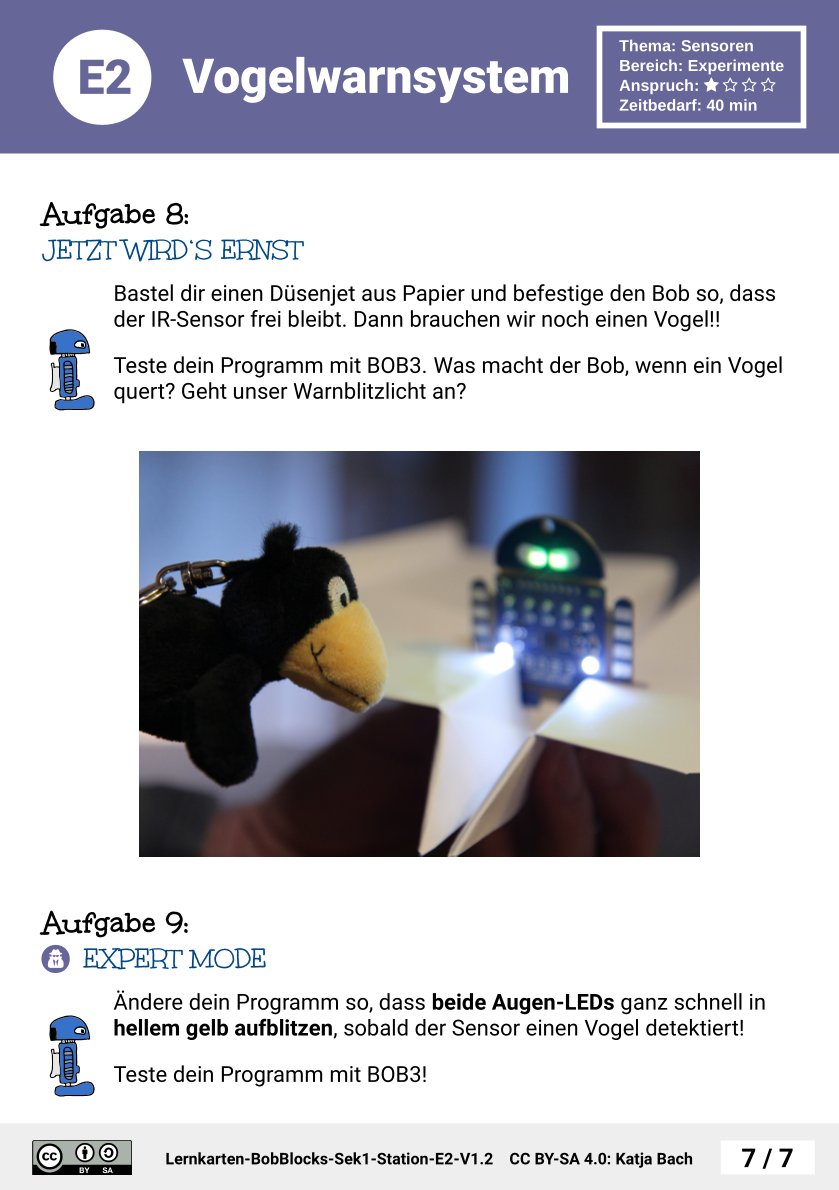
Klasse 5-6 E2 - Vogelwarnsystem
E2 - Vogelwarnsystem
Hinderniserkennung für ein Flugzeug
Bereich: Experimente
Vorraussetzung: Station B2
Lernziele: Implementation einer Hinderniserkennung: Bob analysiert mit seinem IR-Sensor den Reflexionswert. Bei Überschreitung eines Grenzwertes aktiviert er ein Warnblitzlicht. Fallunterscheidung, Variable und Operator.
Anspruch: Einfach
Aufgaben: A1-A8
Differenzierung: A9
Zeitbedarf : ca. 40 Minuten
Downloads:
Klasse 5-6 E3 - Bob's smart-home
E3 - Bob's smart-home
Automatische Indoor-Beleuchtung
Bereich: Experimente
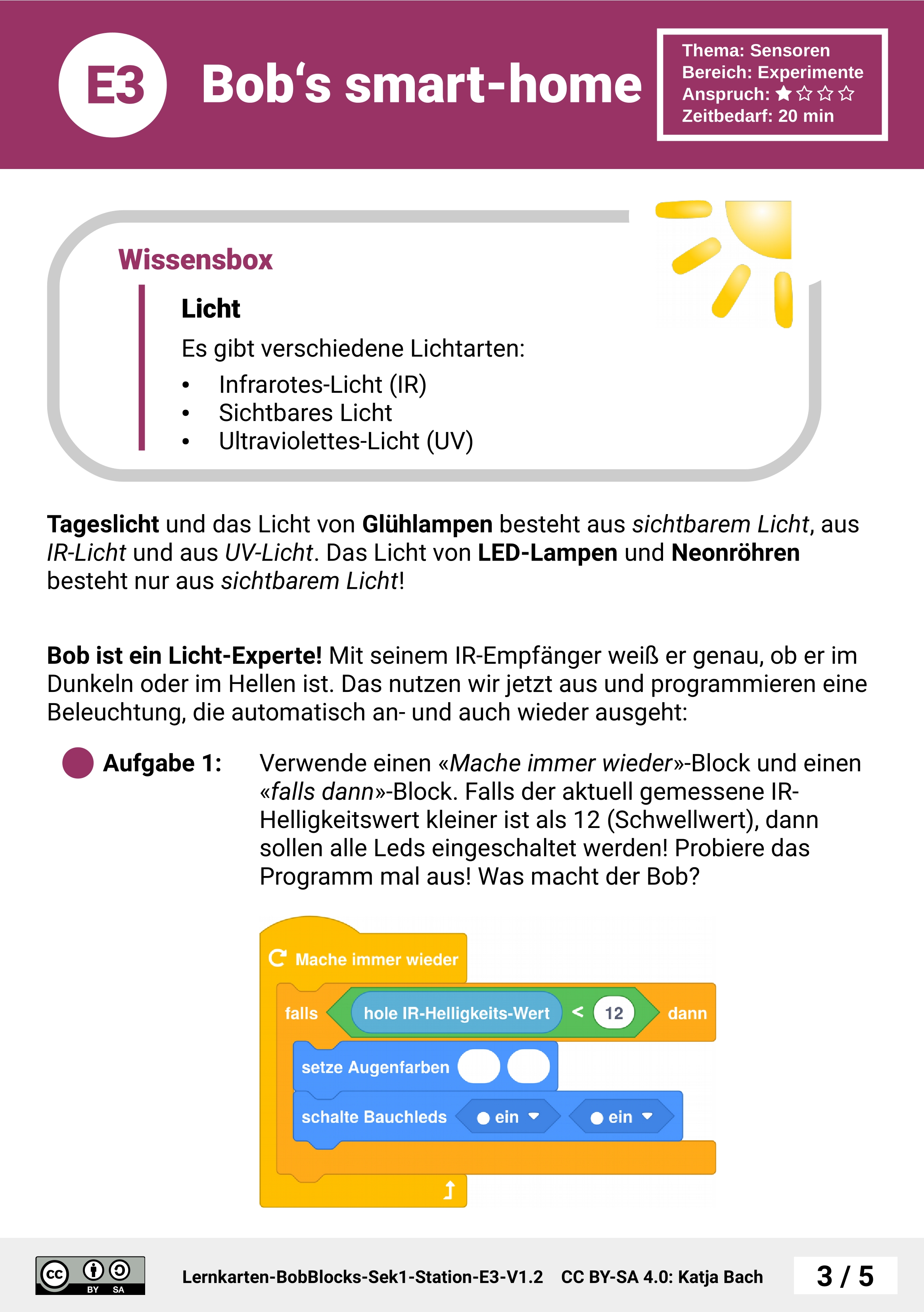
Lernziele: Implementation einer automatischen Indoor Beleuchtung: Bob analysiert mit seinem IR-Sensor den Helligkeitswert der aktuellen Tageslichtsituation und schaltet ab einem Schwellwert automatisch alle Leds ein.
Anspruch: Einfach
Aufgaben: A1-A3
Differenzierung: A4
Zeitbedarf : ca. 20 Minuten
Download-PDF
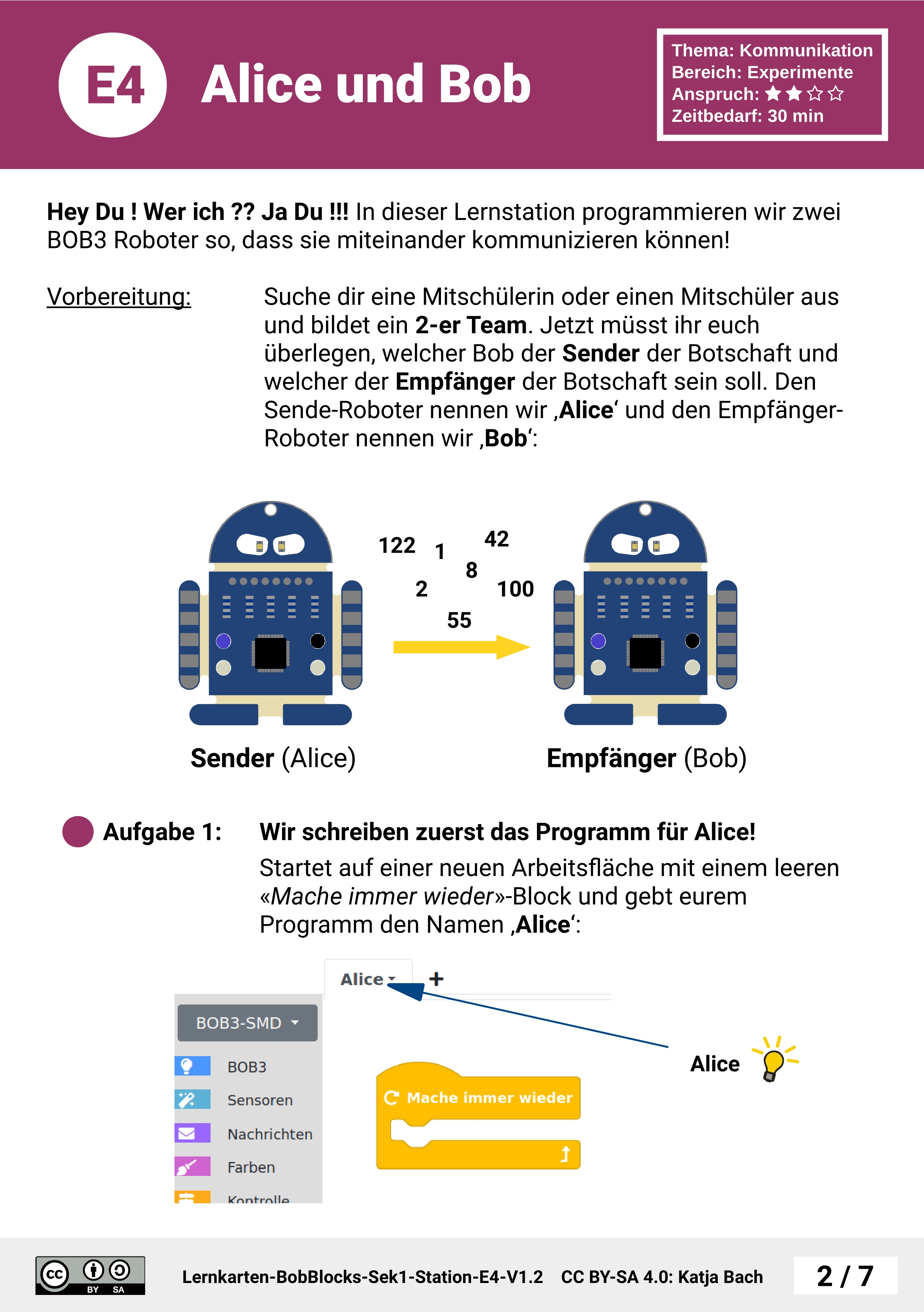
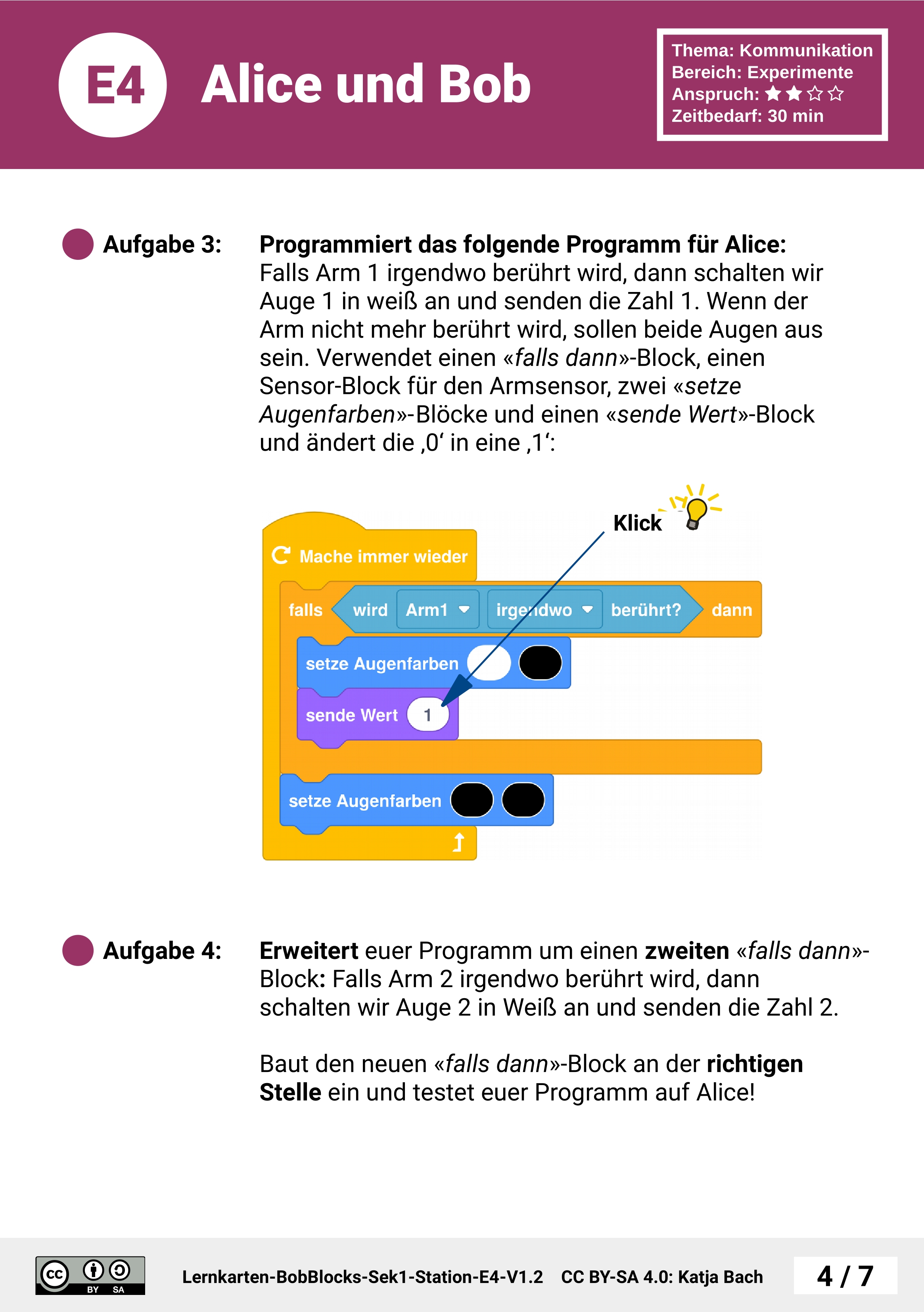
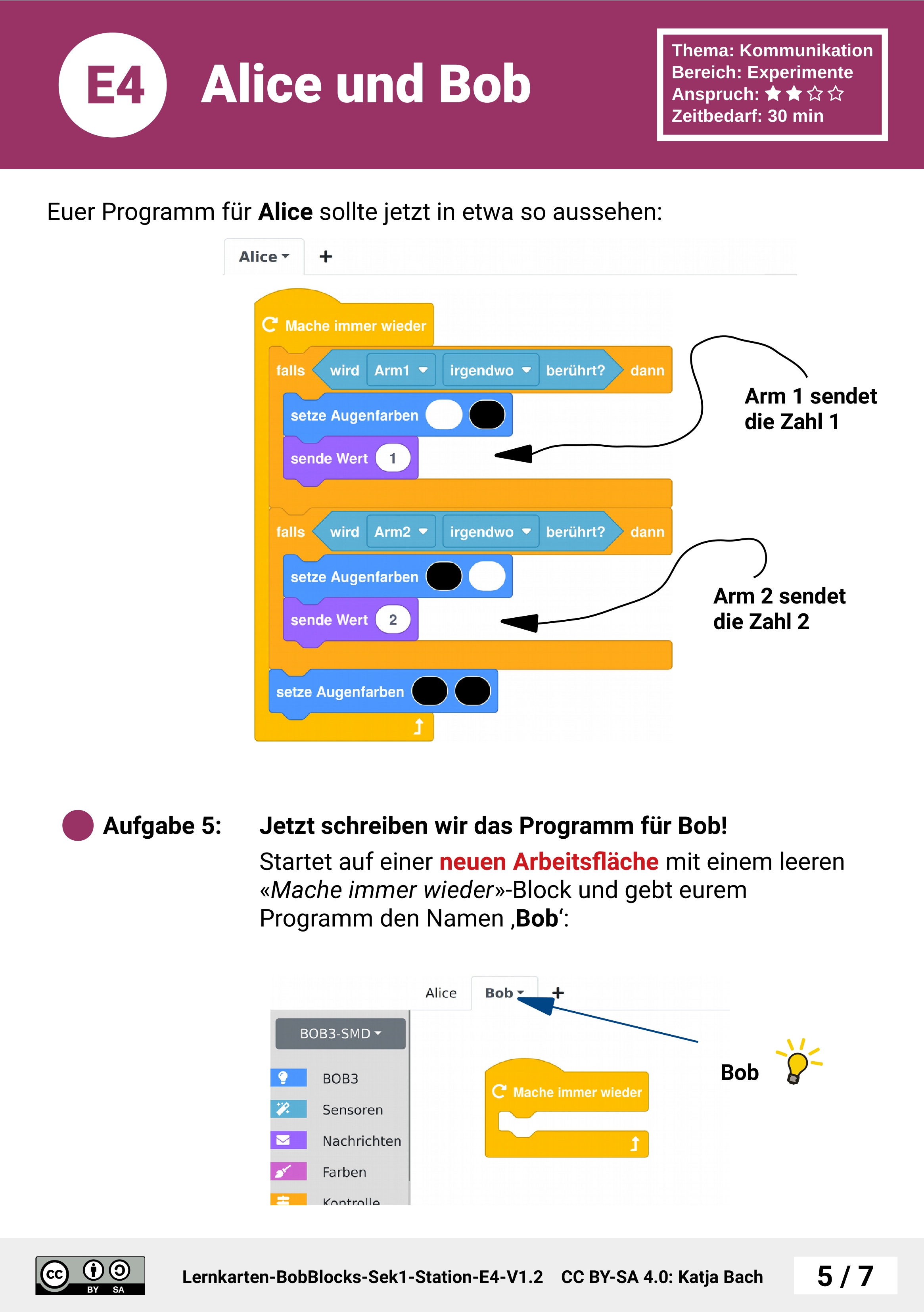
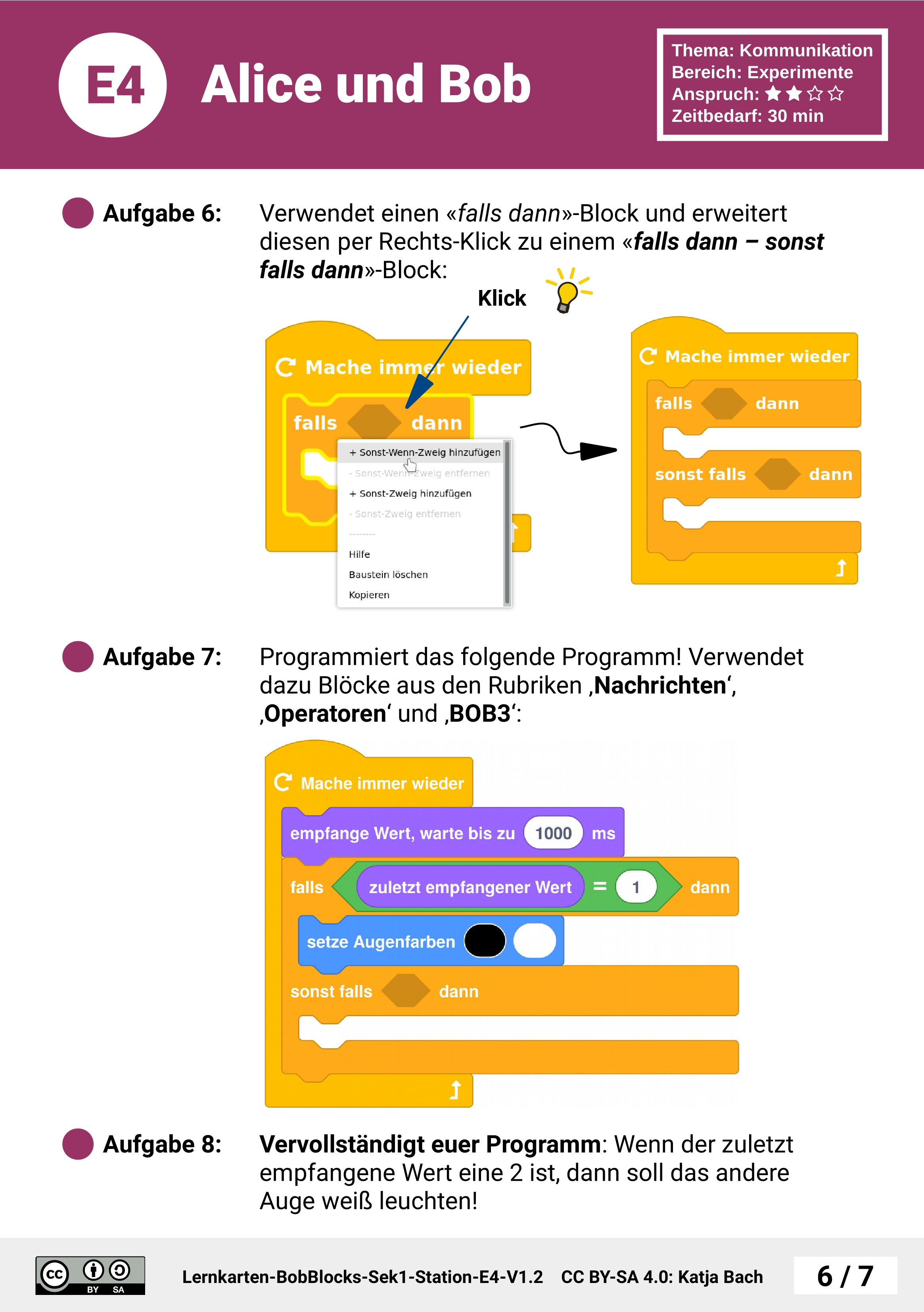
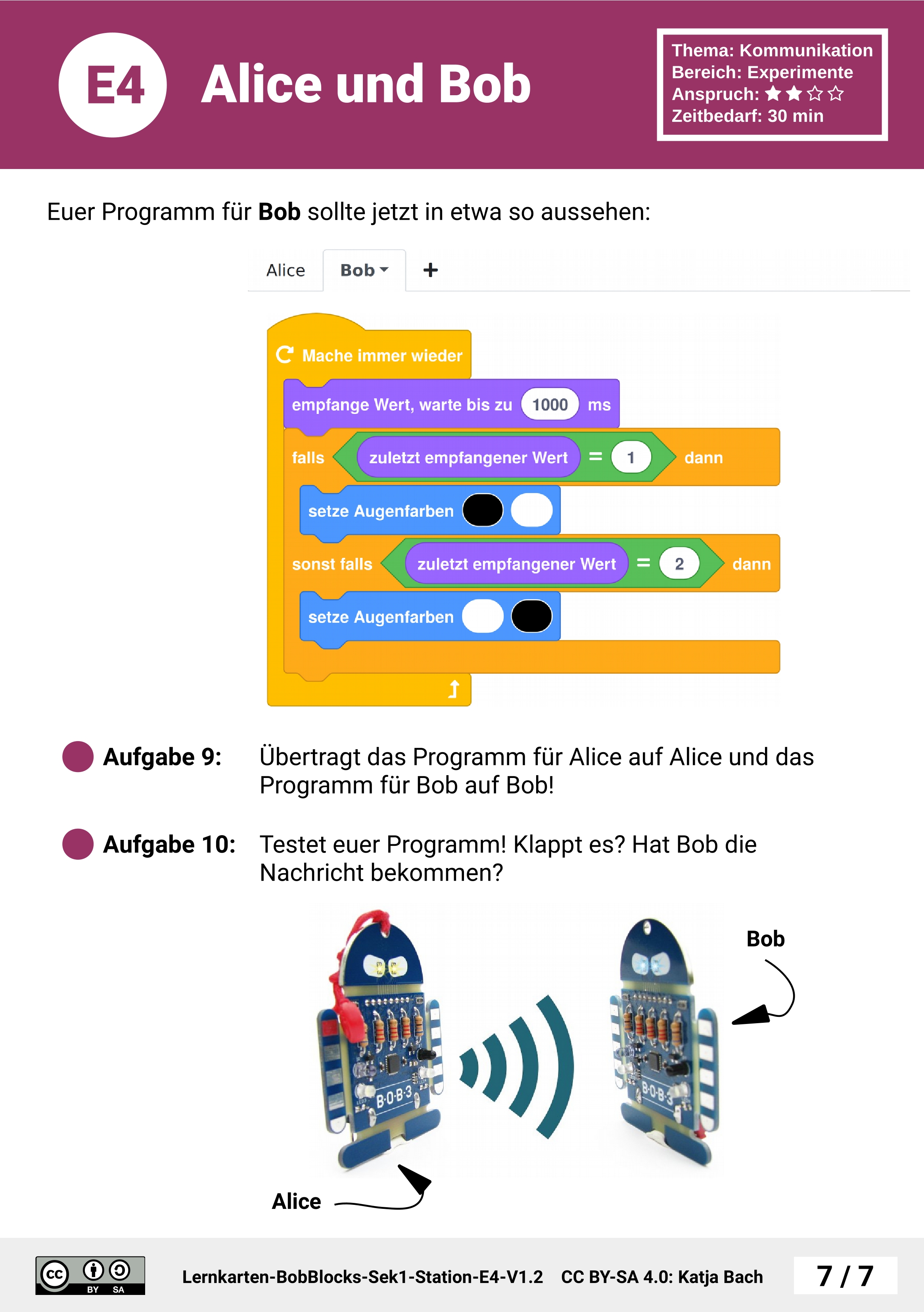
Klasse 5-6 E4 - Alice und Bob
![]()
E4 - Alice und Bob
Kommunikation
Bereich: Experimente
Lernziele: Implementation einer Infrarot-Datenübertragung zwischen zwei Robotereinheiten
Anspruch: Mittel
Aufgaben: A1-A10
Zeitbedarf : ca. 30 Minuten
Download-PDF
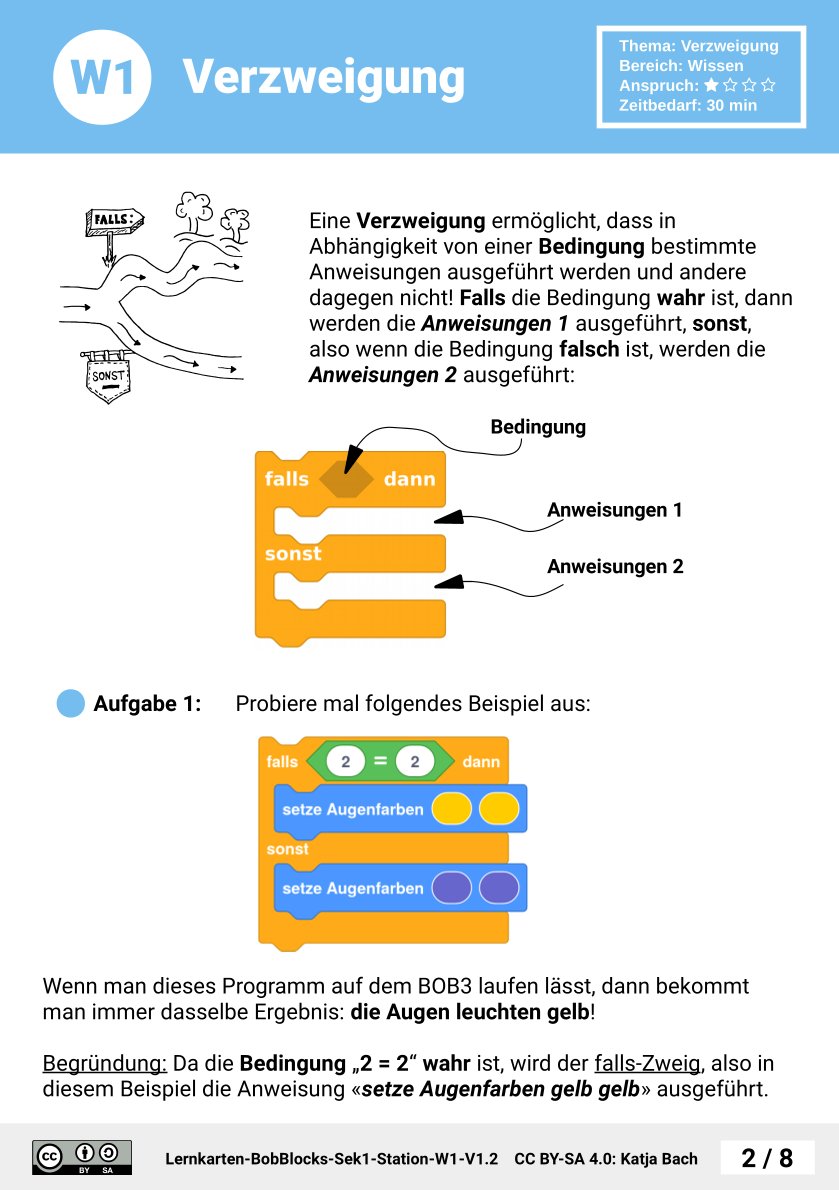
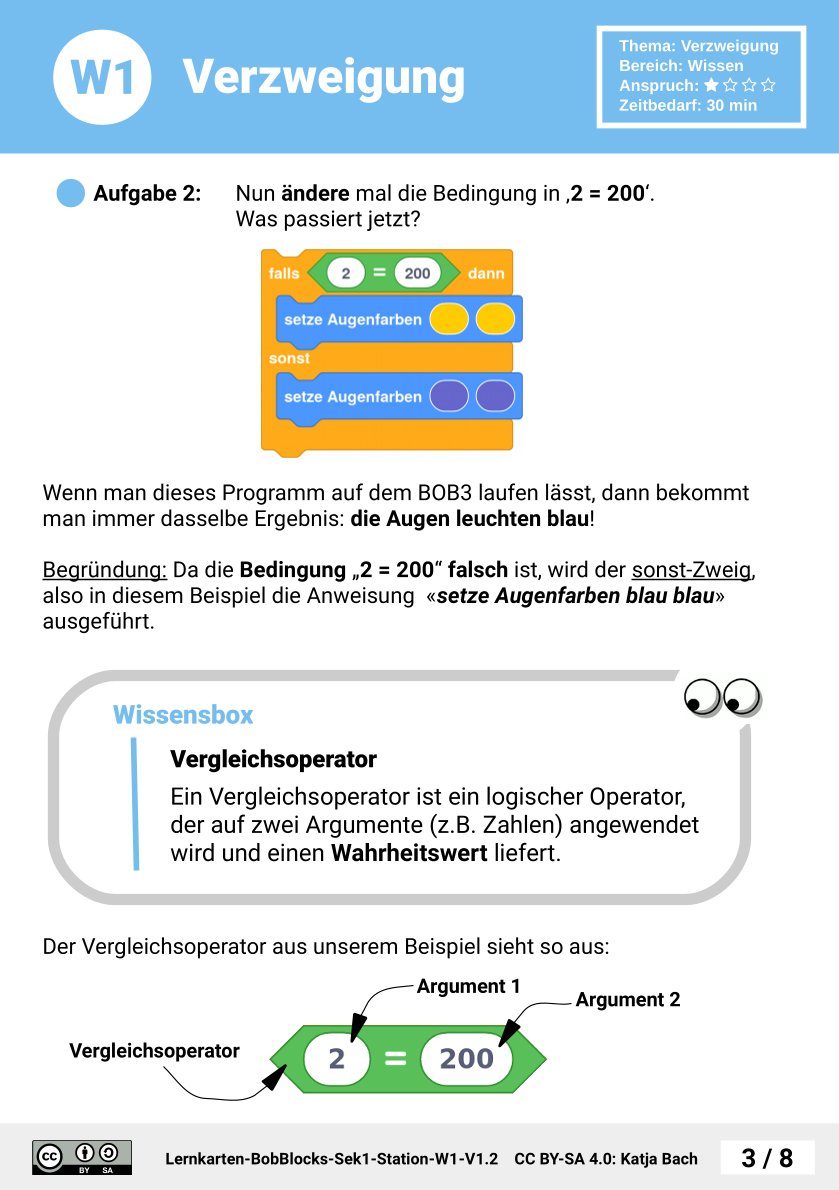
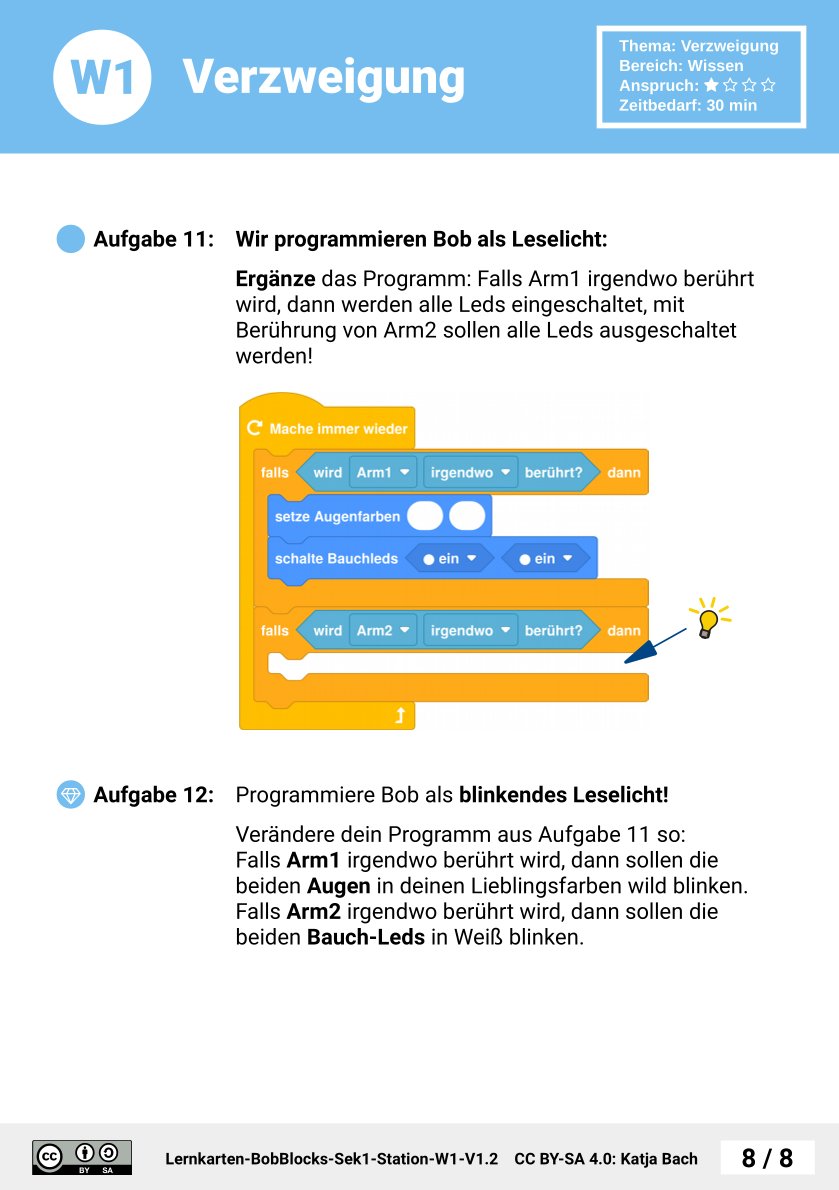
Klasse 5-6 W1 - Verzweigung
W1 - Verzweigung
Die Programmstruktur Verzweigung
Bereich: Wissen
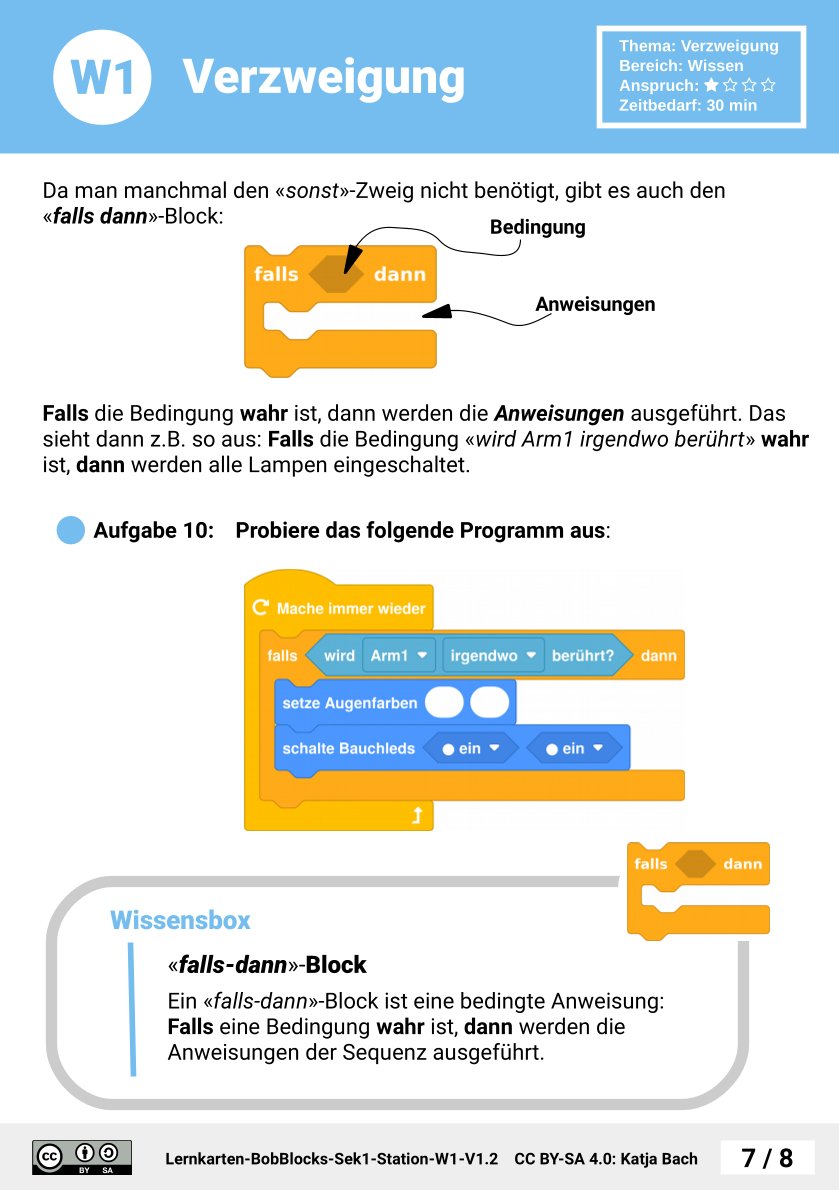
Lernziele: Bedeutung und Anwendung von Verzweigungen, Vergleichsoperatoren, Wahrheitswerte, «falls-dann»-Block
Anspruch: Einfach
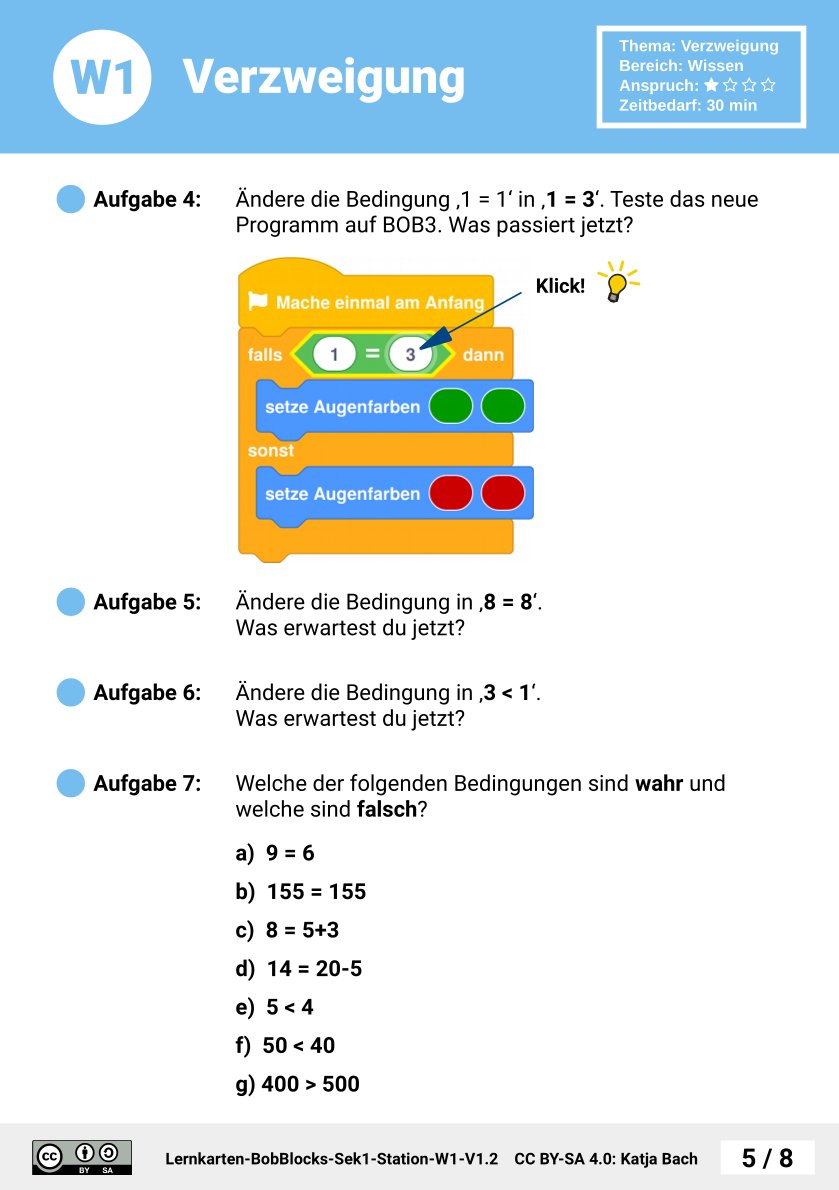
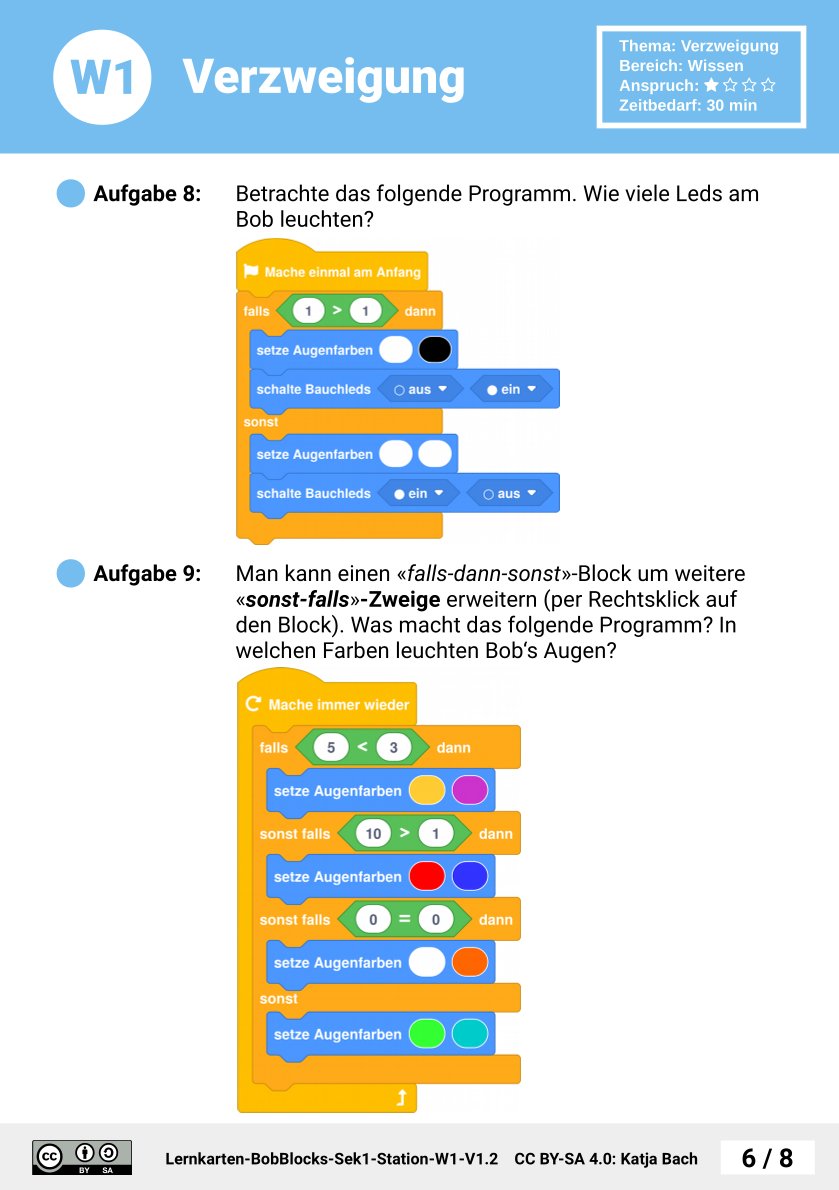
Aufgaben: A1-A8
Differenzierung: A9
Zeitbedarf : ca. 30 Minuten
Download als PDF
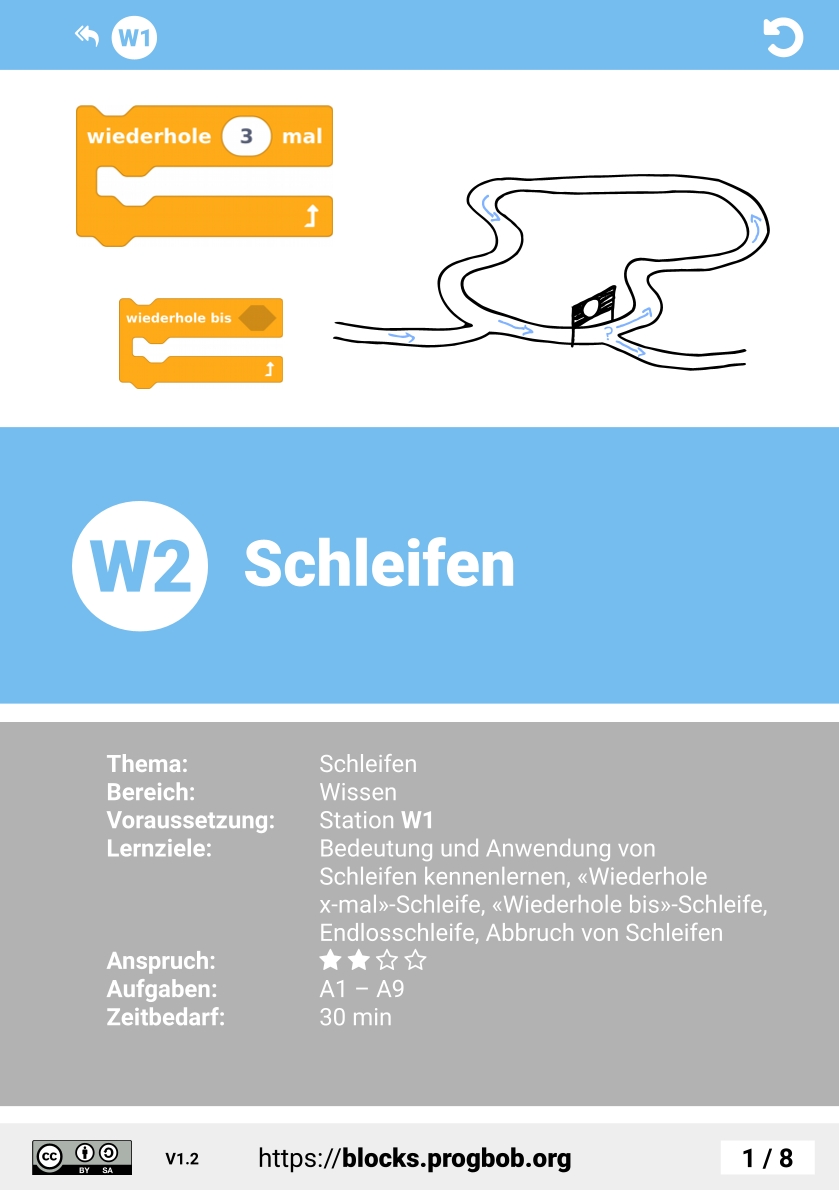
Klasse 5-6 W2 - Schleifen
W2 - Schleifen
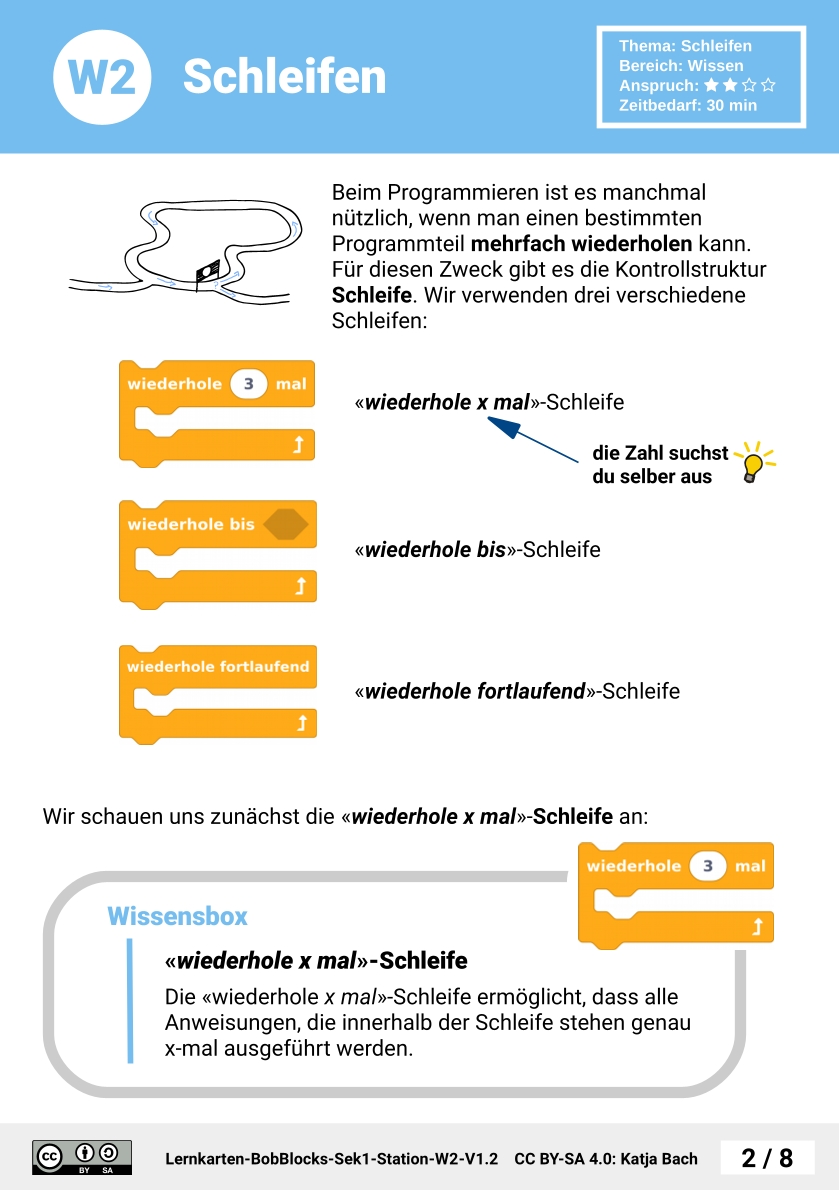
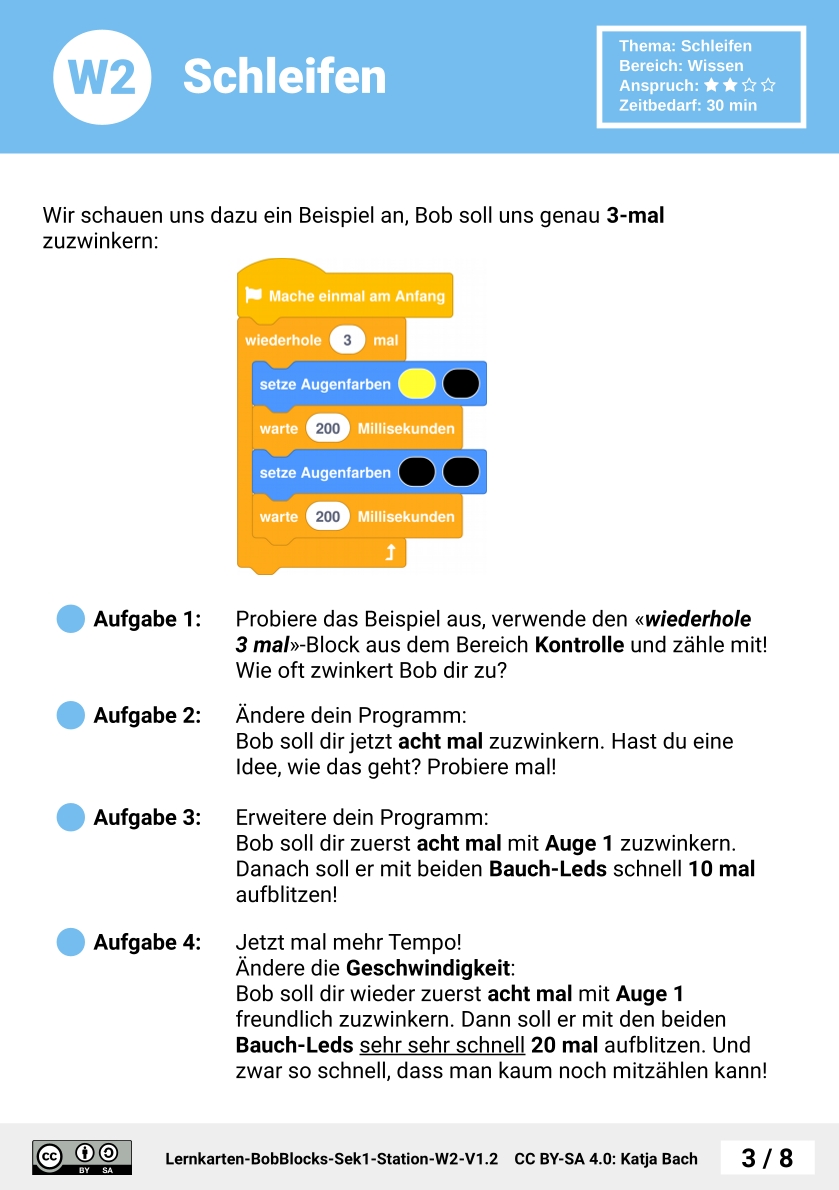
Wiederholungen mit Schleifen
Bereich: Wissen
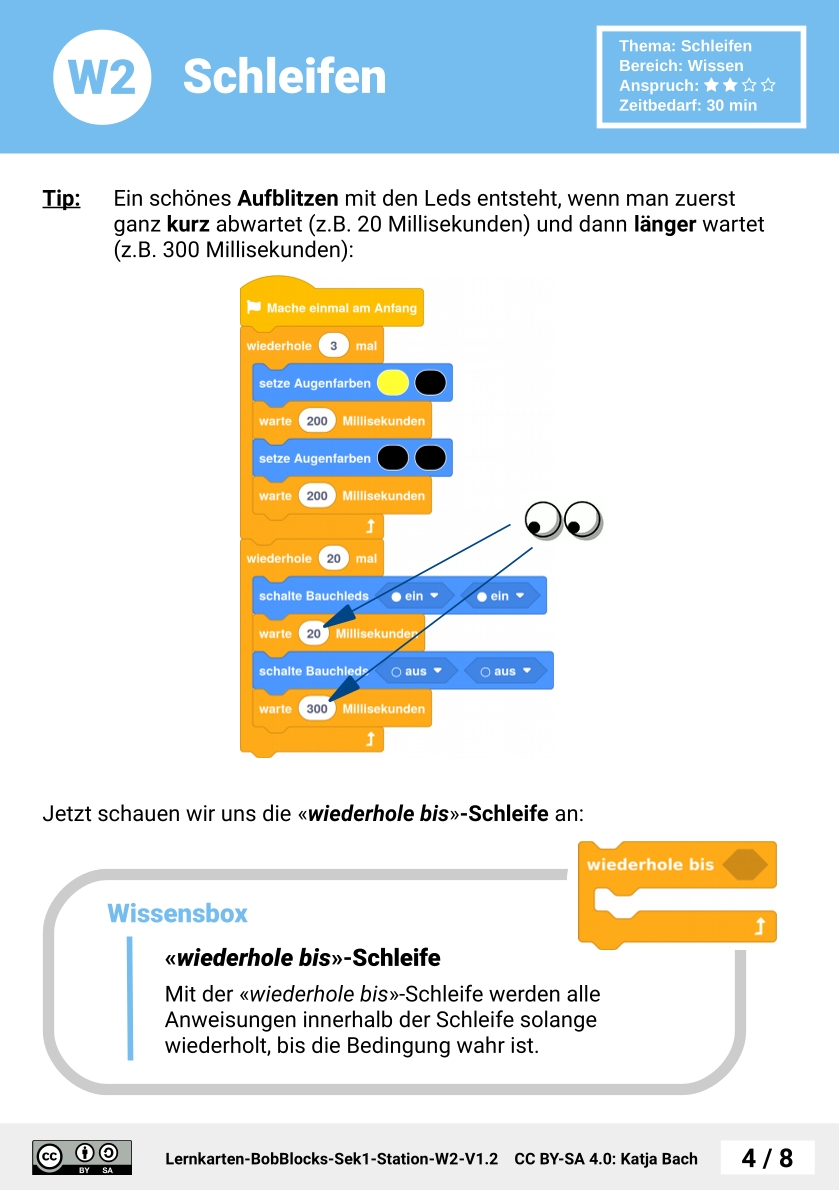
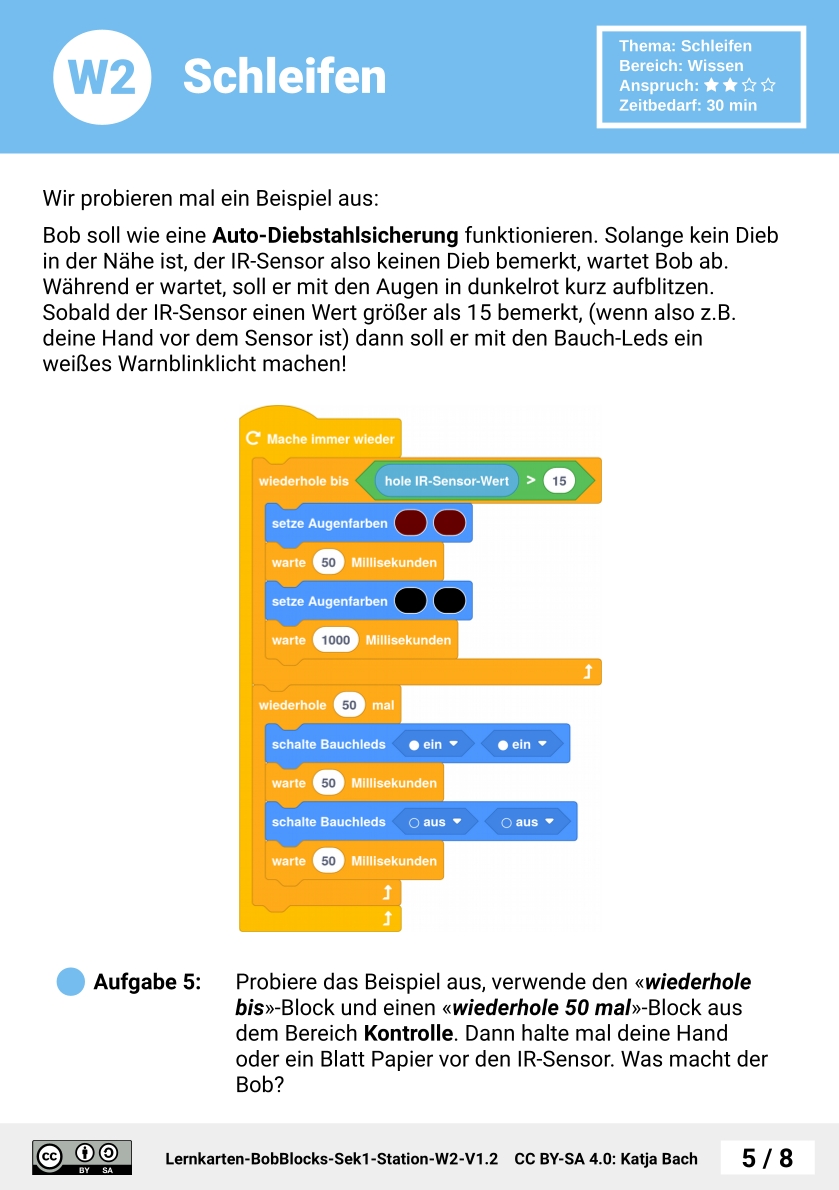
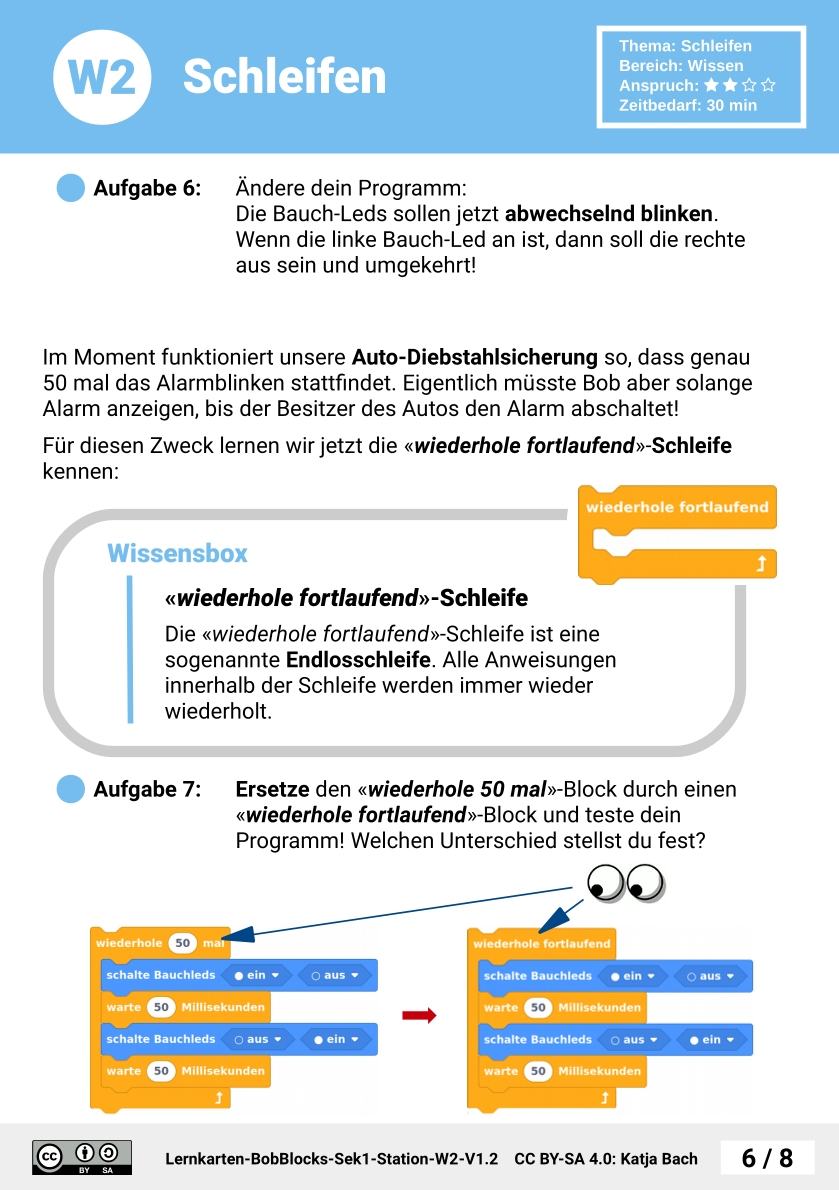
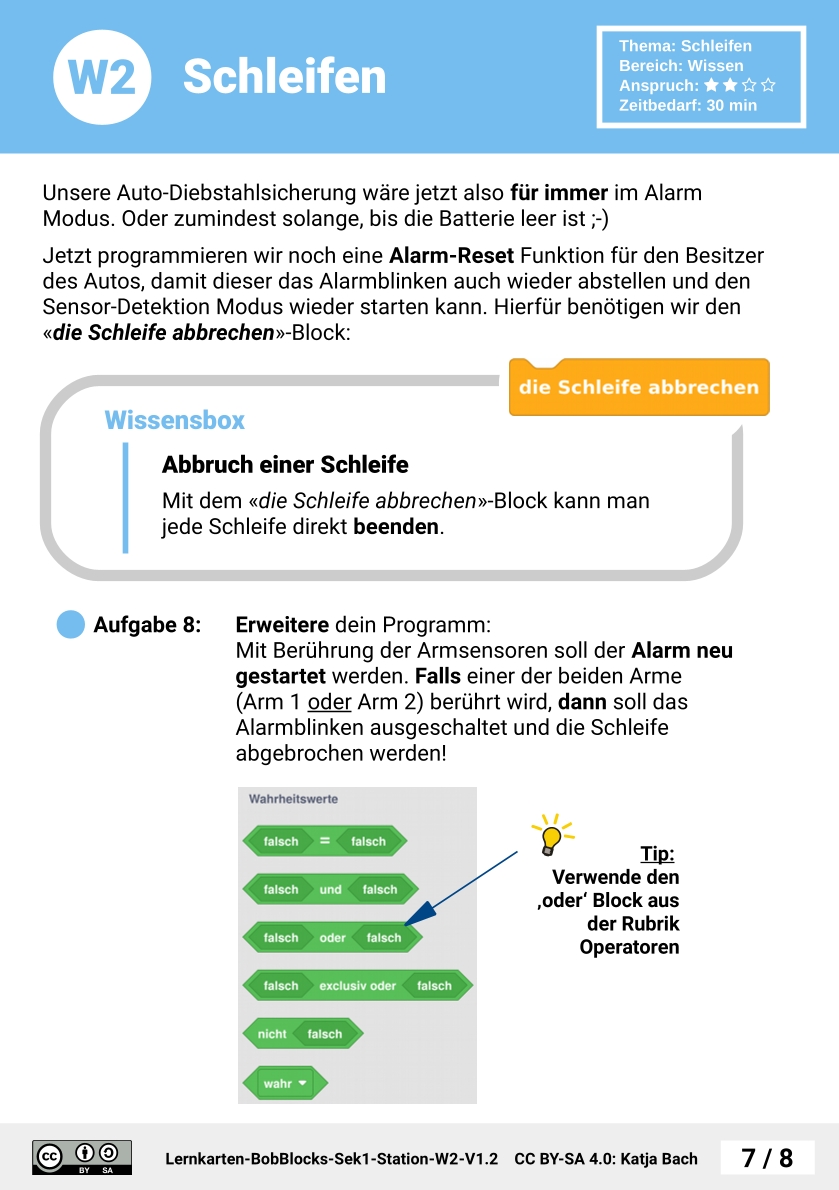
Lernziele: Bedeutung und Anwendung von Schleifen kennenlernen, «wiederholex-mal»-Schleife, «wiederhole bis»-Schleife, Endlosschleife, Abbruch von Schleifen
Anspruch: Mittel
Aufgaben: A1-A9
Zeitbedarf : ca. 30 Minuten
Download-PDF
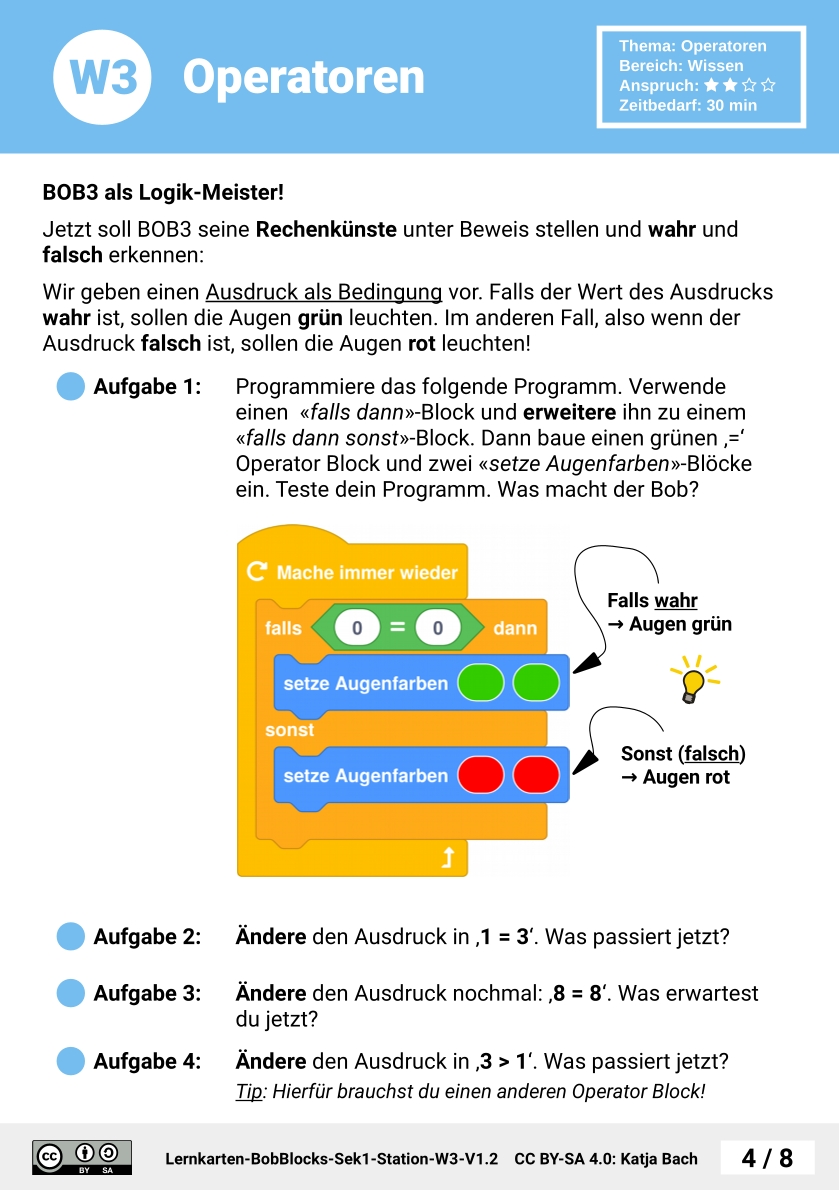
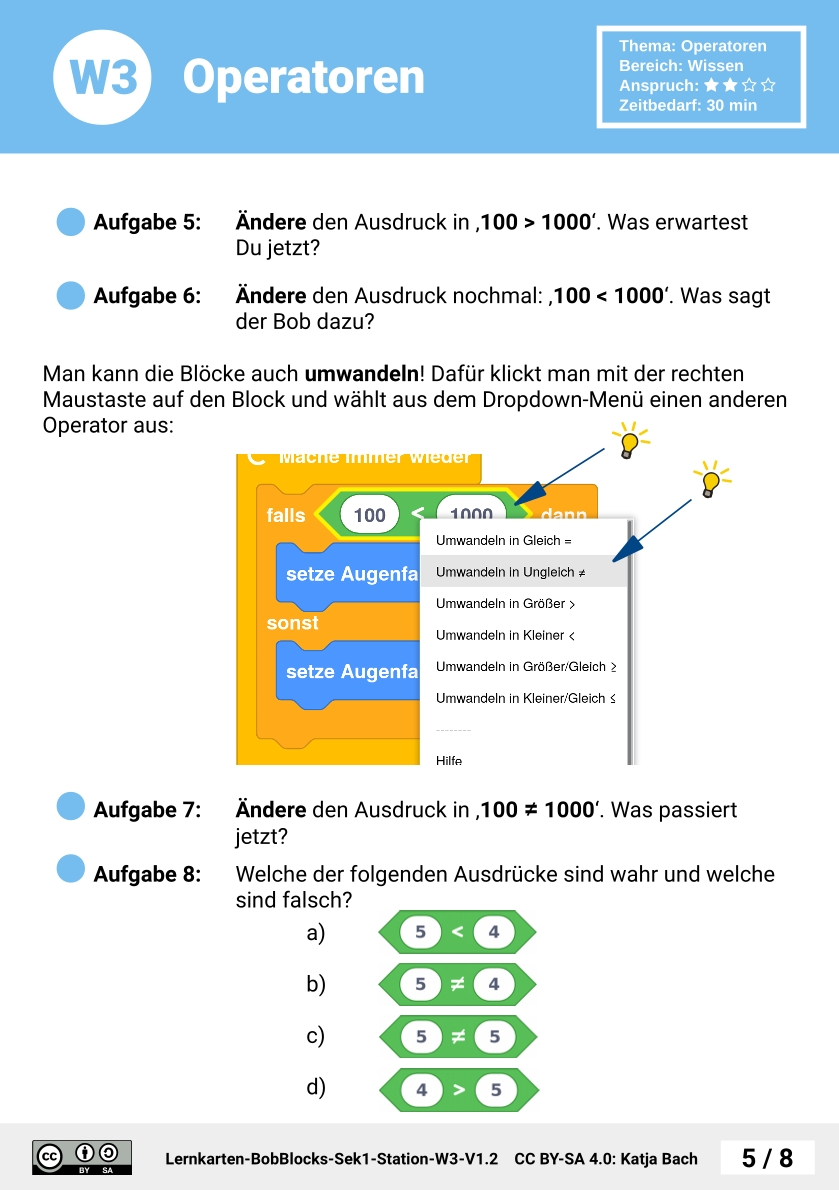
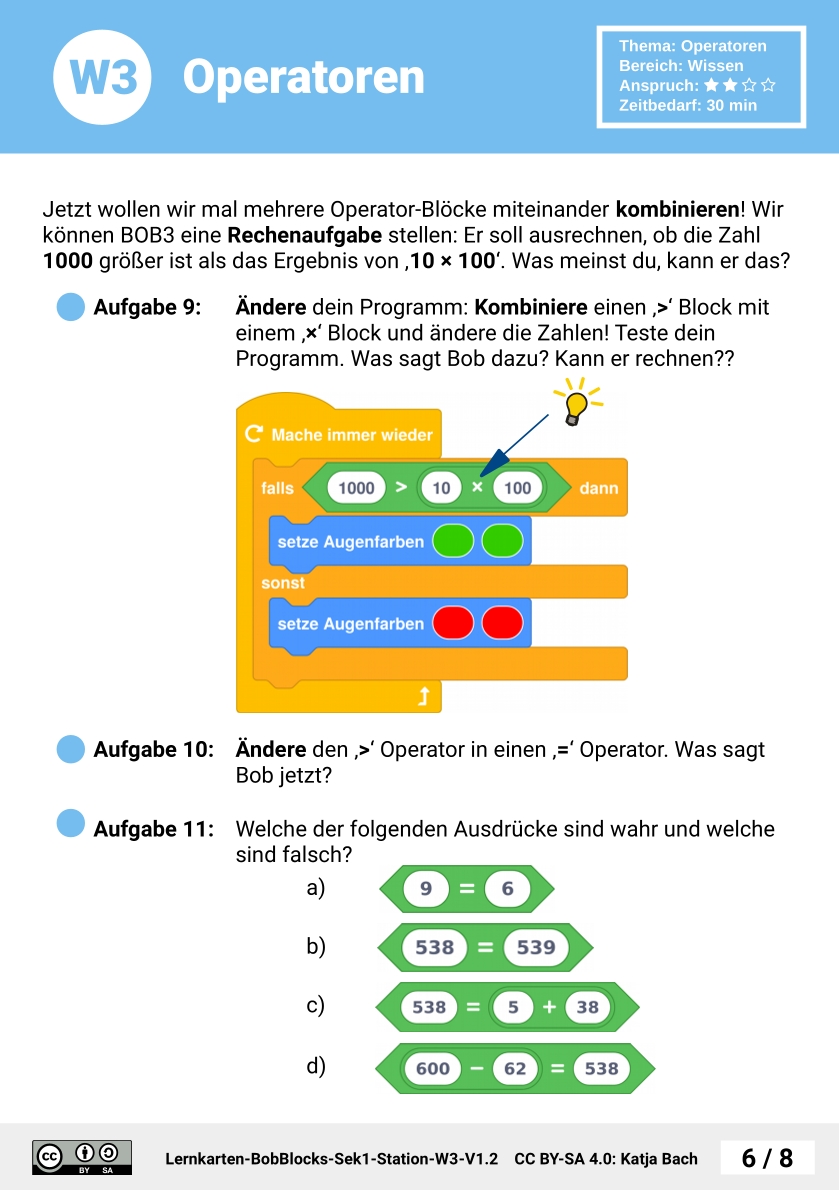
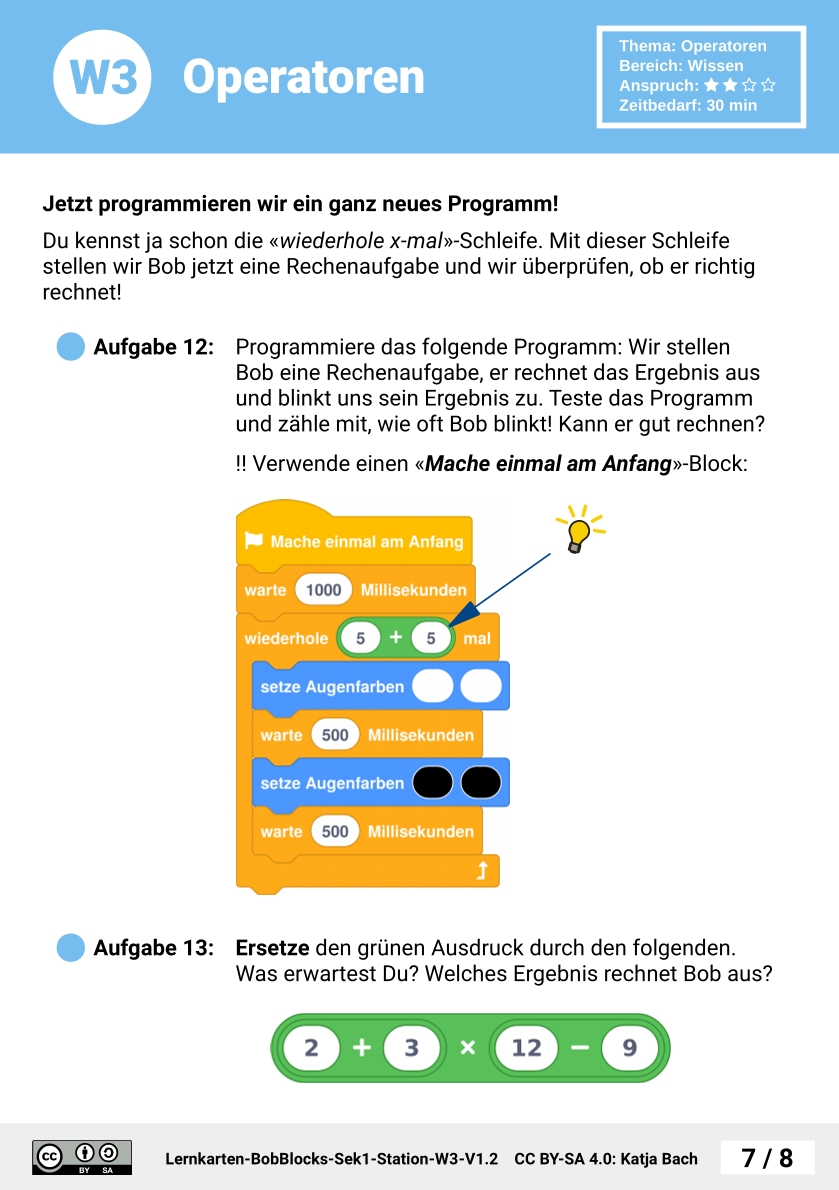
Klasse 5-6 W3 - Operatoren
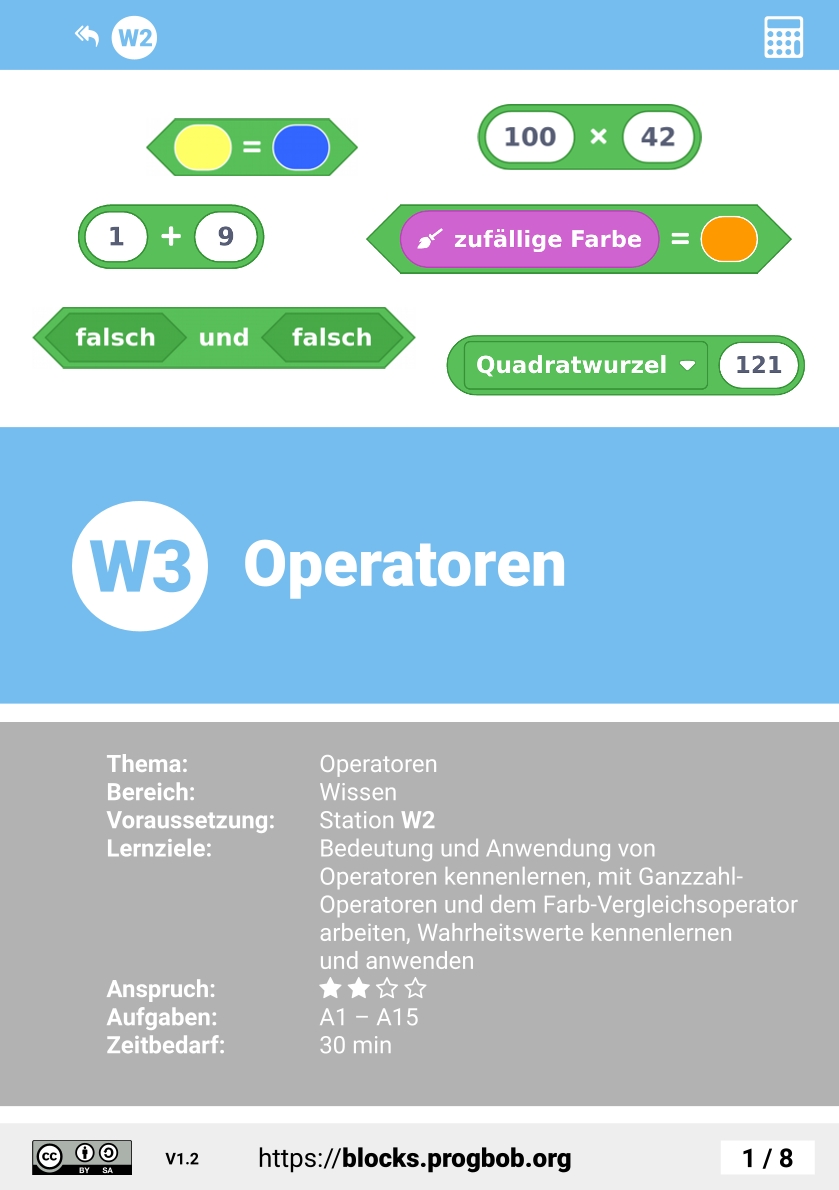
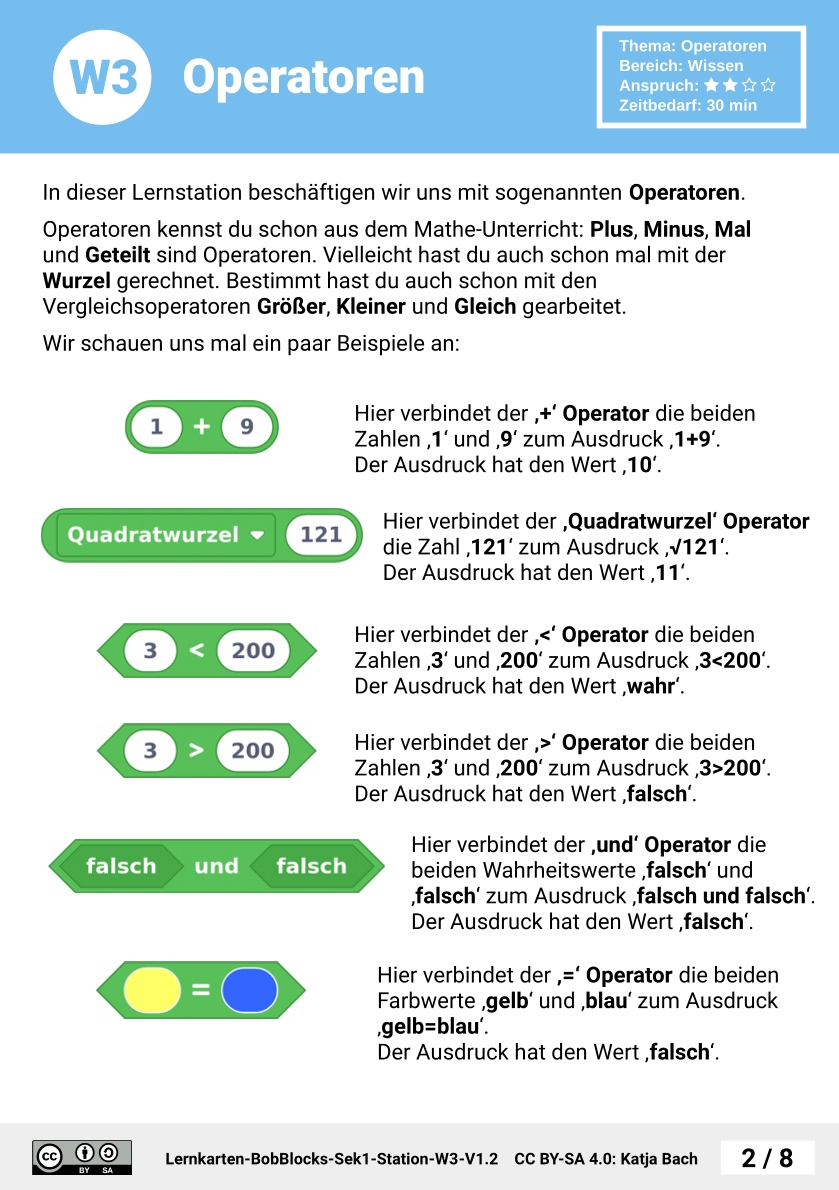
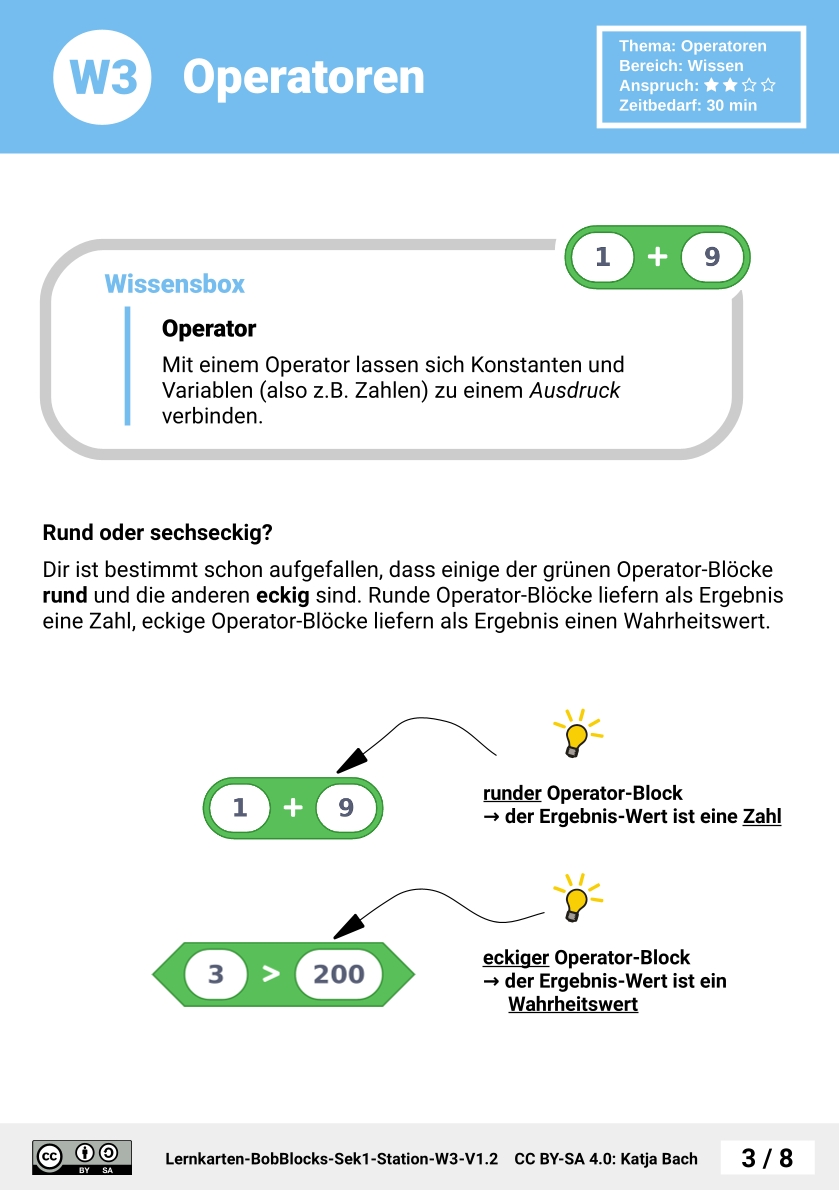
W3 - Operatoren
Rechnen mit Operatoren
Bereich: Wissen
Lernziele: Bedeutung und Anwendung von Operatoren kennenlernen, mit Ganzzahl-Operatoren und dem Farb-Vergleichsoperator arbeiten, Wahrheitswerte kennenlernen und anwenden
Anspruch: Mittel
Aufgaben: A1-A15
Zeitbedarf : ca. 30 Minuten
Download-PDF
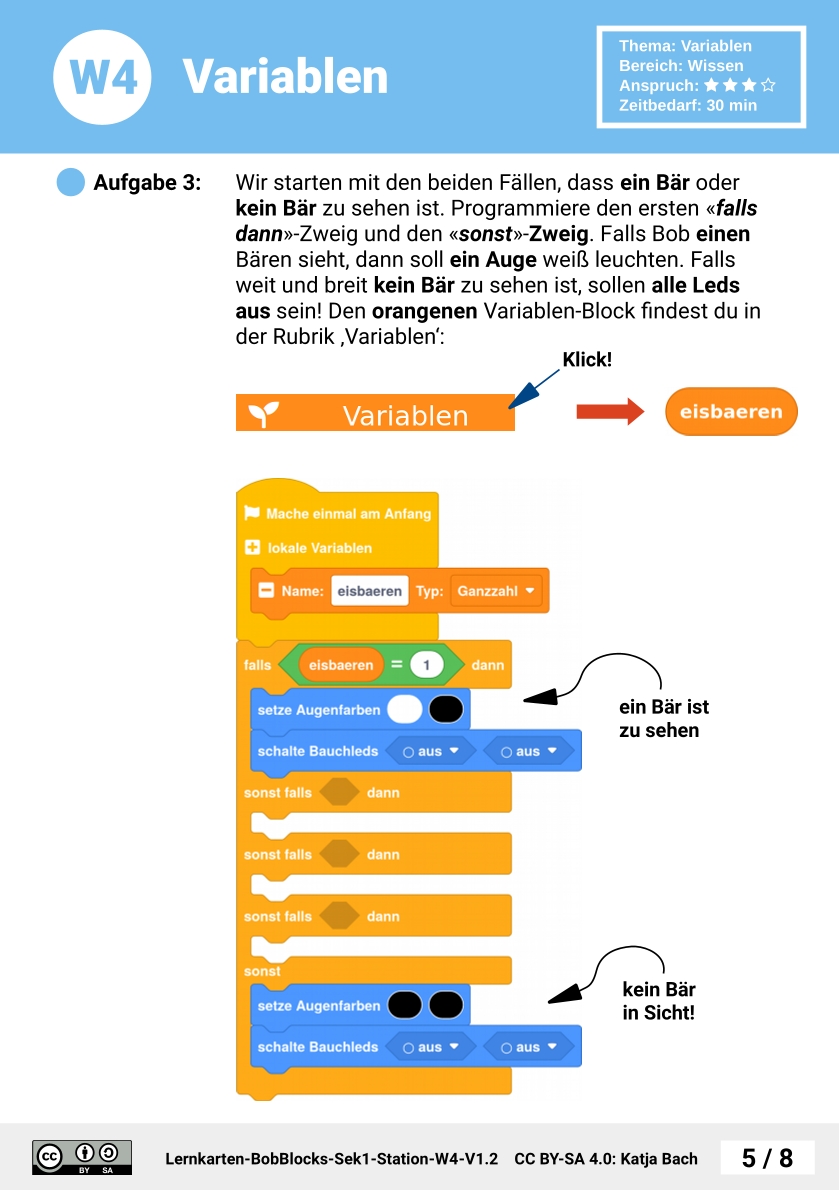
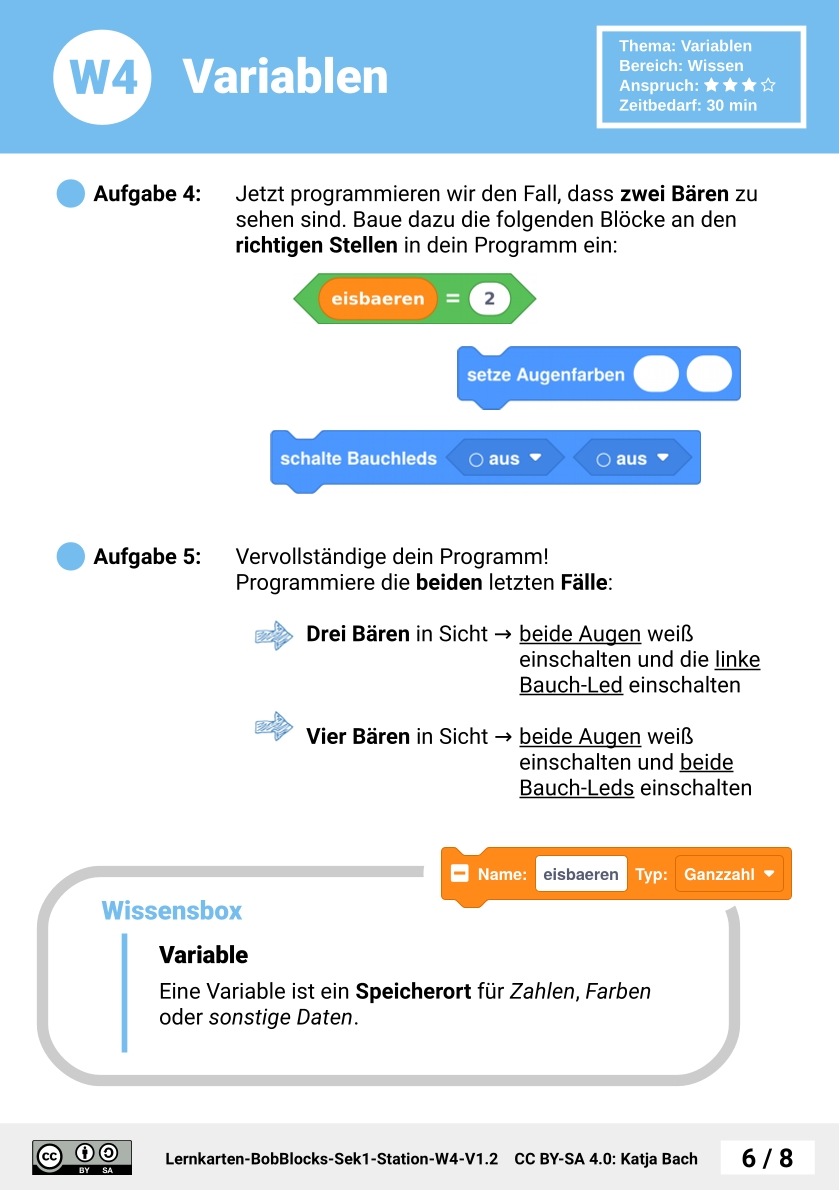
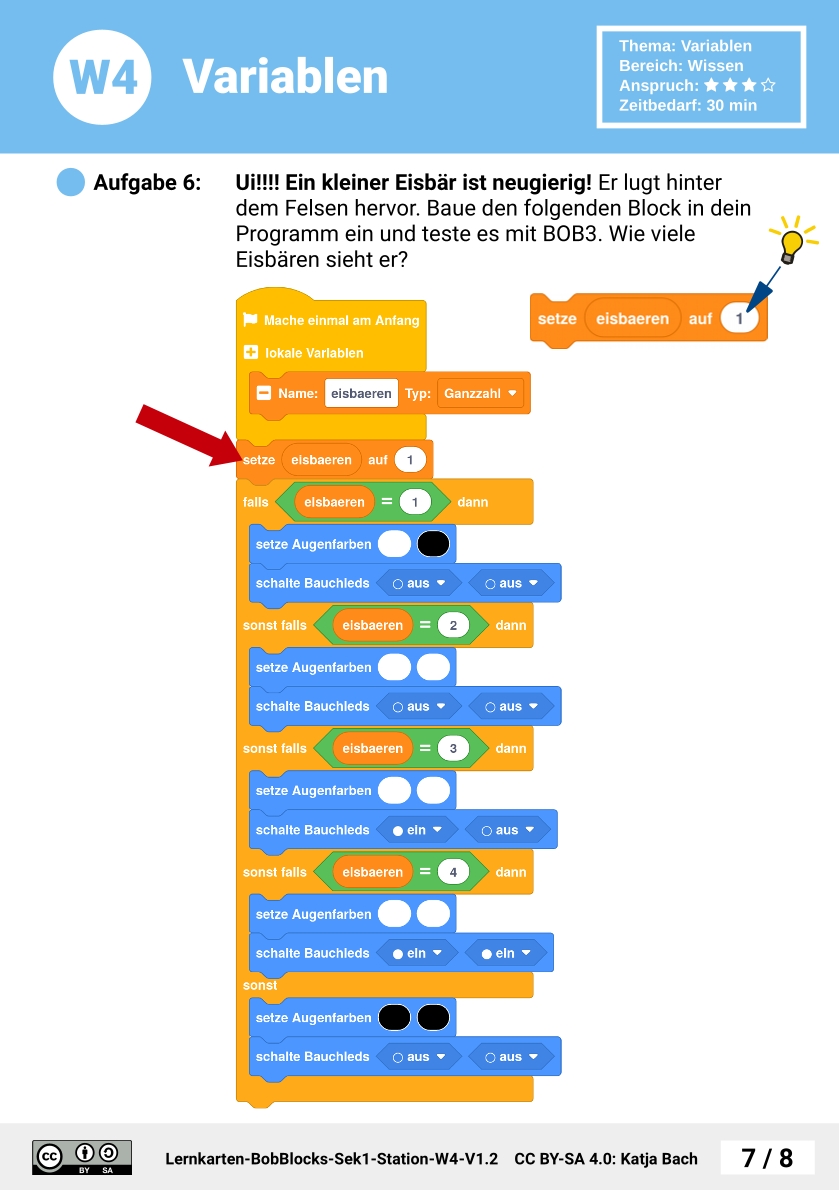
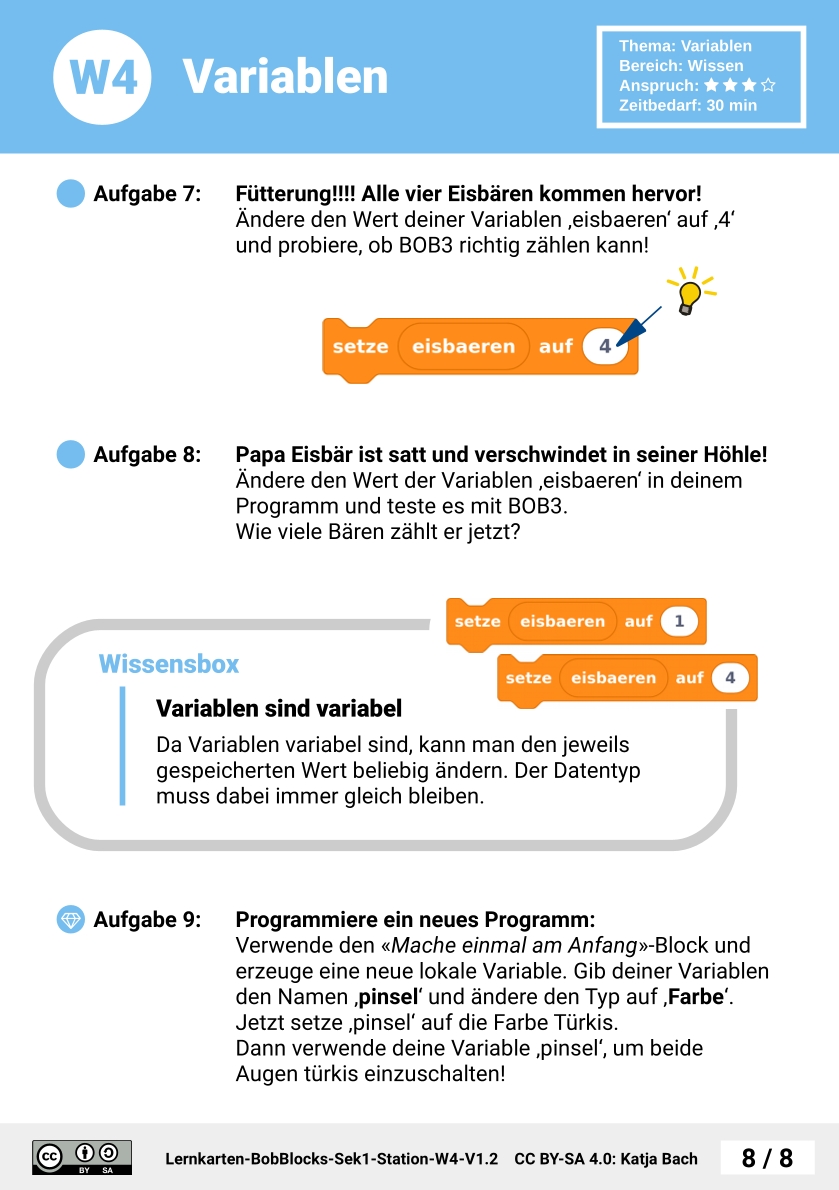
Klasse 5-6 W4 - Variablen

W4 - Variablen
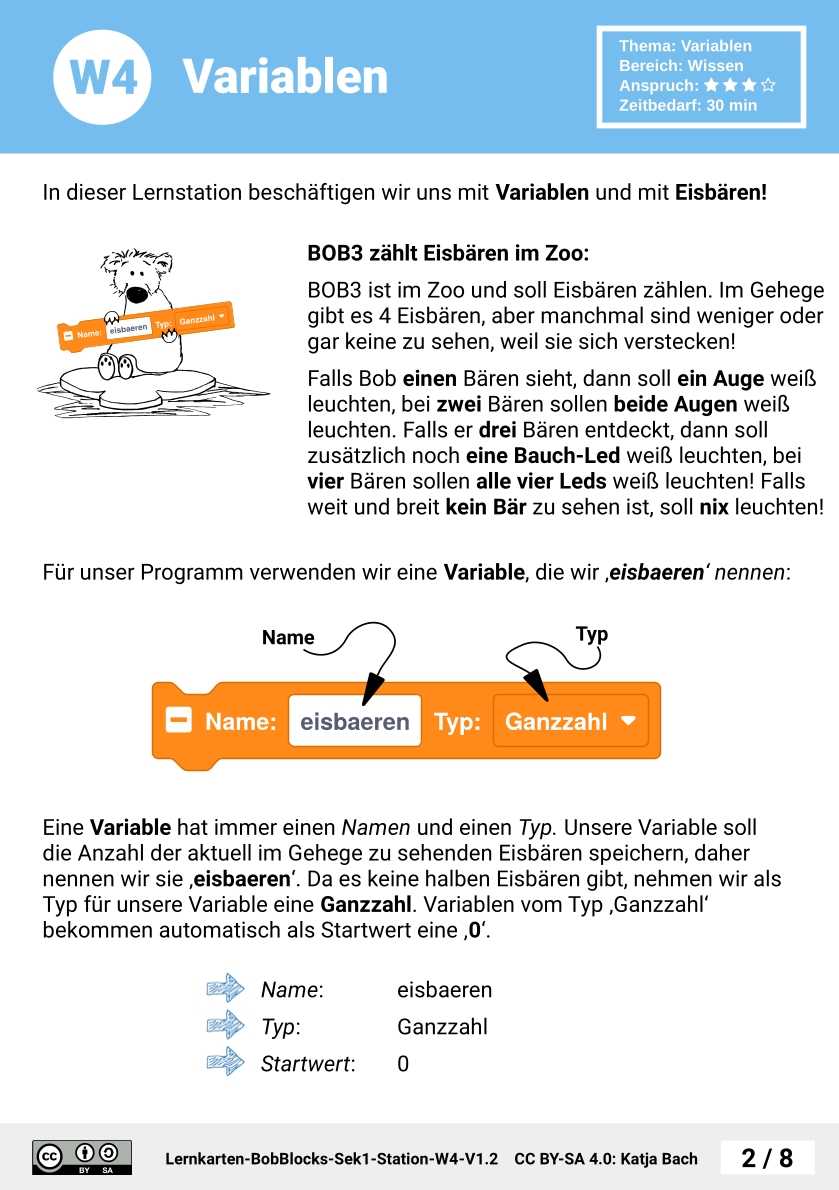
Verwendung von Variablen
Bereich: Wissen
Lernziele: Bedeutung und Anwendung von Variablen kennenlernen, eine Ganzzahl-Variable deklarieren, initialisieren und im Programm verwenden, Zuweisung von neuen Werten verstehen und anwenden
Anspruch: Mittel
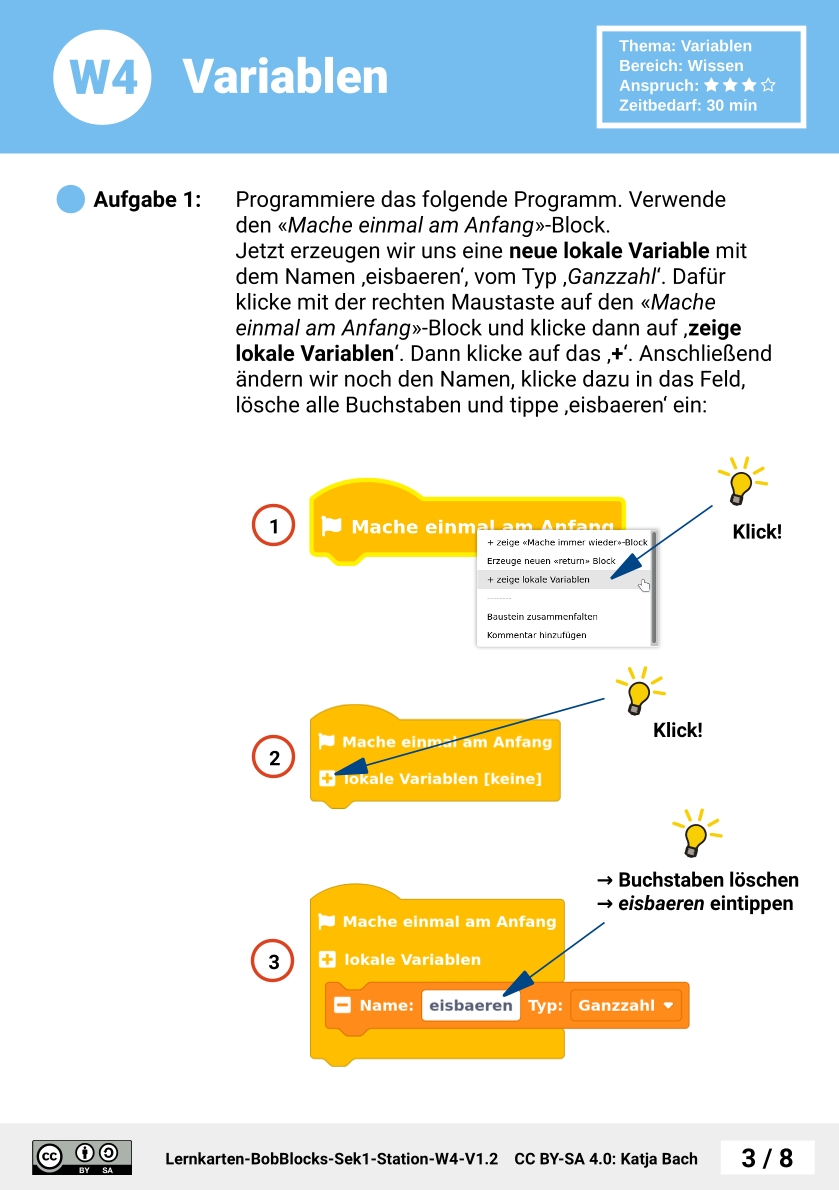
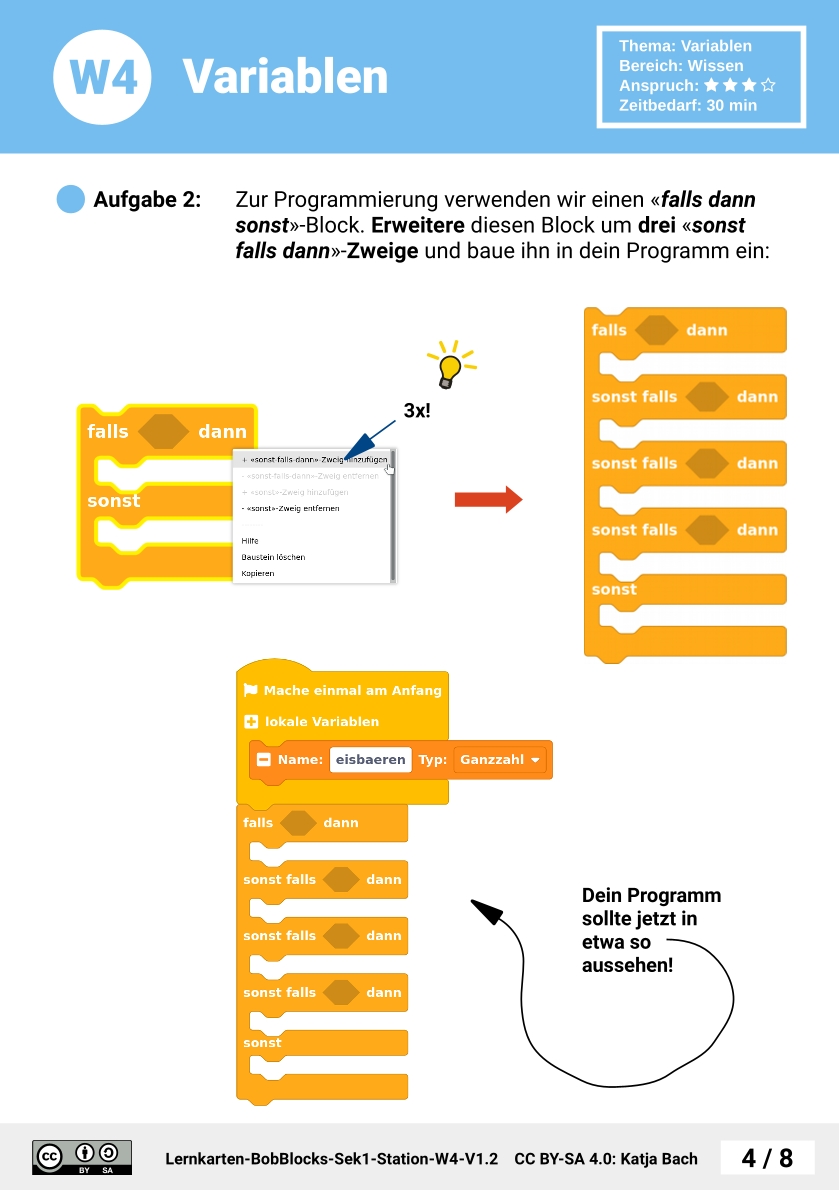
Aufgaben: A1-A8
Differenzierung: A9
Zeitbedarf : ca. 30 Minuten