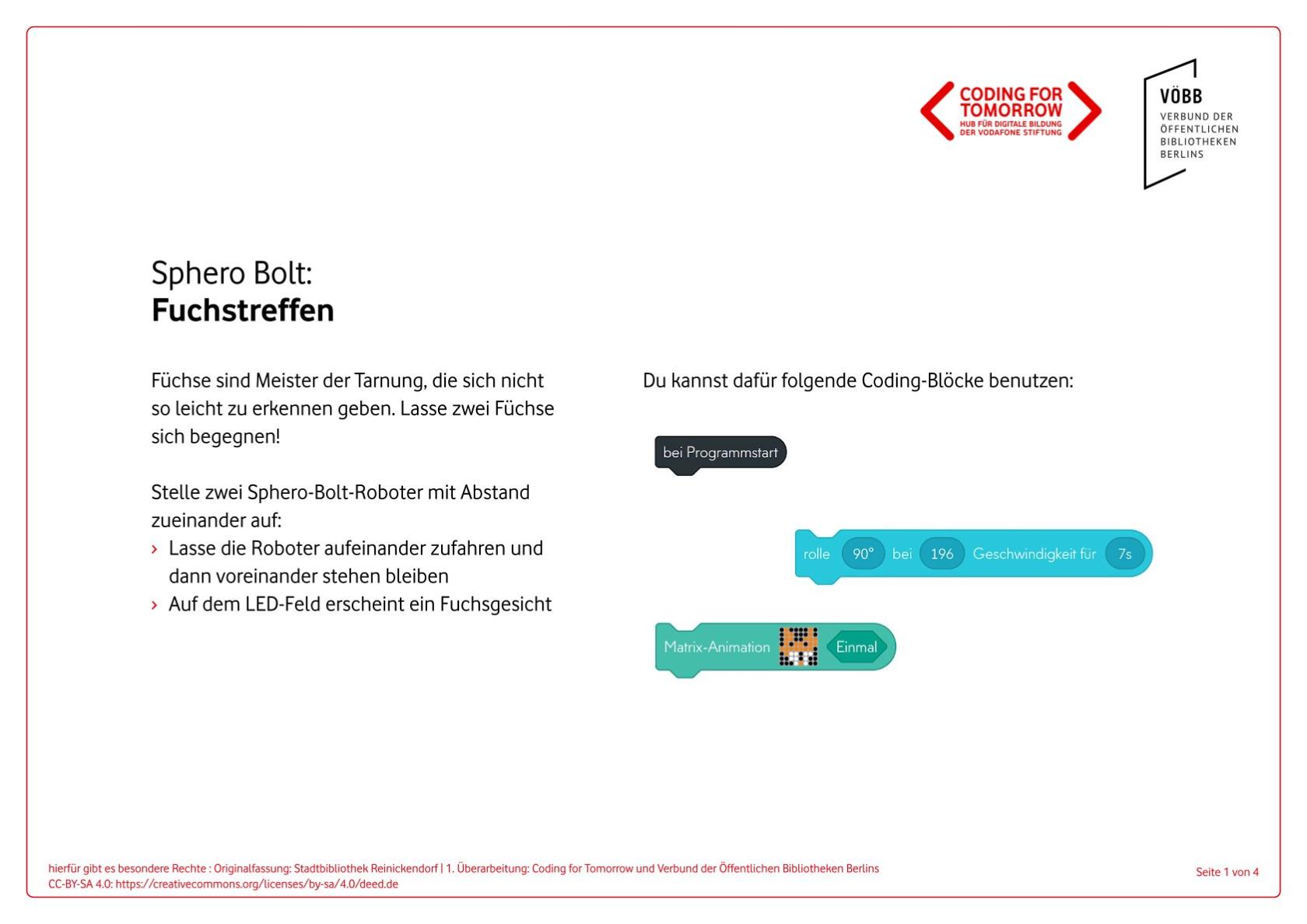
Das Arbeitsblatt **„Sphero Bolt: Fuchstreffen“**, fordert die Schüler:innen auf, zwei Sphero-Roboter so zu programmieren, dass sie aufeinander zufahren, voreinander stoppen und ein Fuchsgesicht anzeigen. Außerdem lernen sie, wie der Sphero mithilfe seiner Sensoren auf verschiedene Situationen reagiert – etwa Freude beim Start, Ärger bei Kollisionen und Angst im freien Fall.
##### [PDF-Download](https://wiki-stadt-hildesheim.peaknetworks.wiki/attachments/24 " CFT_Arbeitsblatt_Sphero_Bolt_Fuchstreffen.pdf ")