
Klasse 5-6 E1 - Taschenlampe
E1 - Taschenlampe
Mehrfachverzweigung und Touch-Sensoren
In dieser Unterrichtseinheit programmieren die Schülerinnen und Schüler eine Taschenlampe mit einstellbarer Helligkeit. An Arm1 des Roboters kann die Helligkeit eingestellt werden, mit Arm 2 lässt sich die Taschenlampe wieder ausschalten.
"Beide Arme vom BOB3 sind Touch-Sensoren. Die Arme „merken“ also, ob sie berührt werden, oder nicht!"
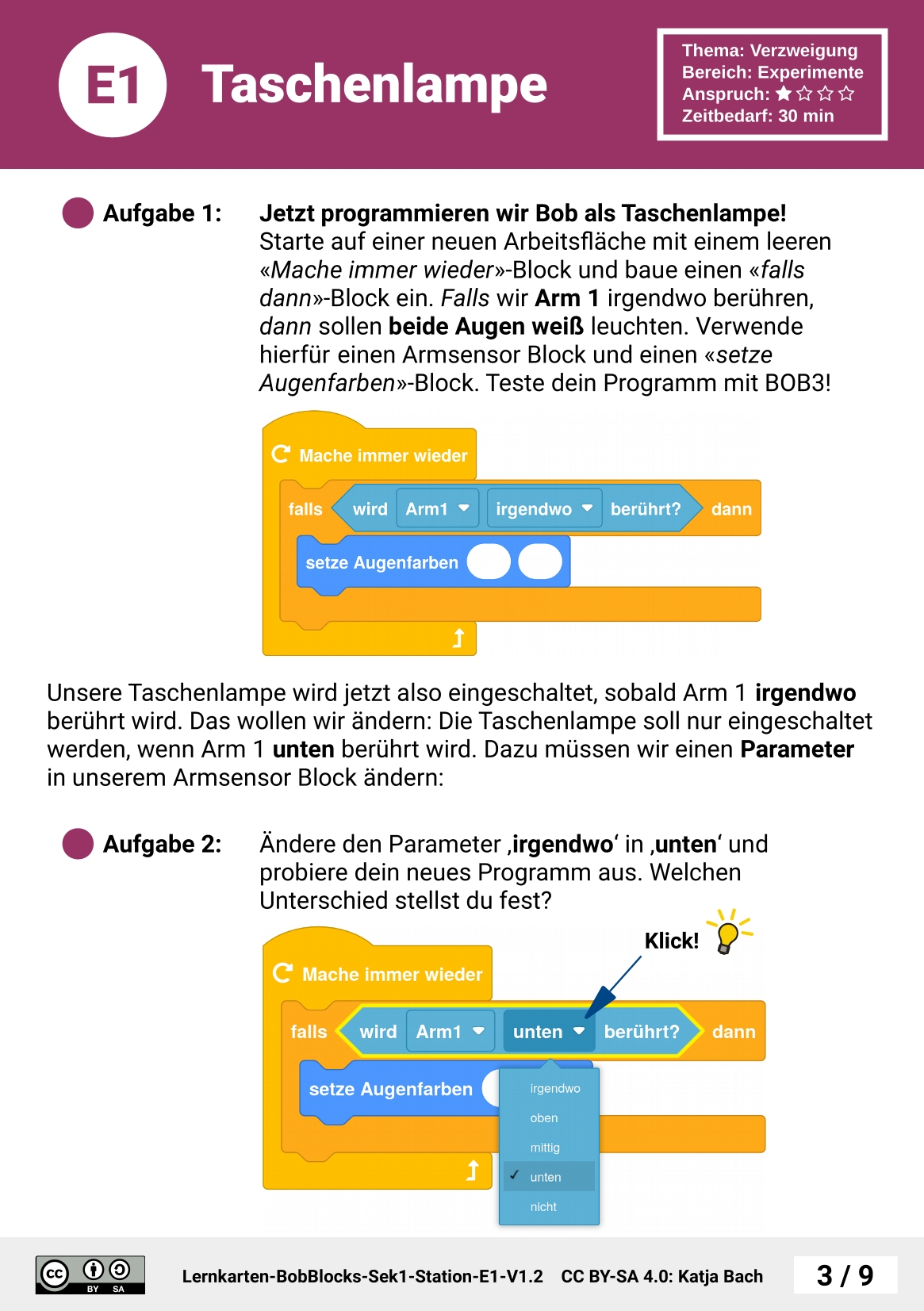
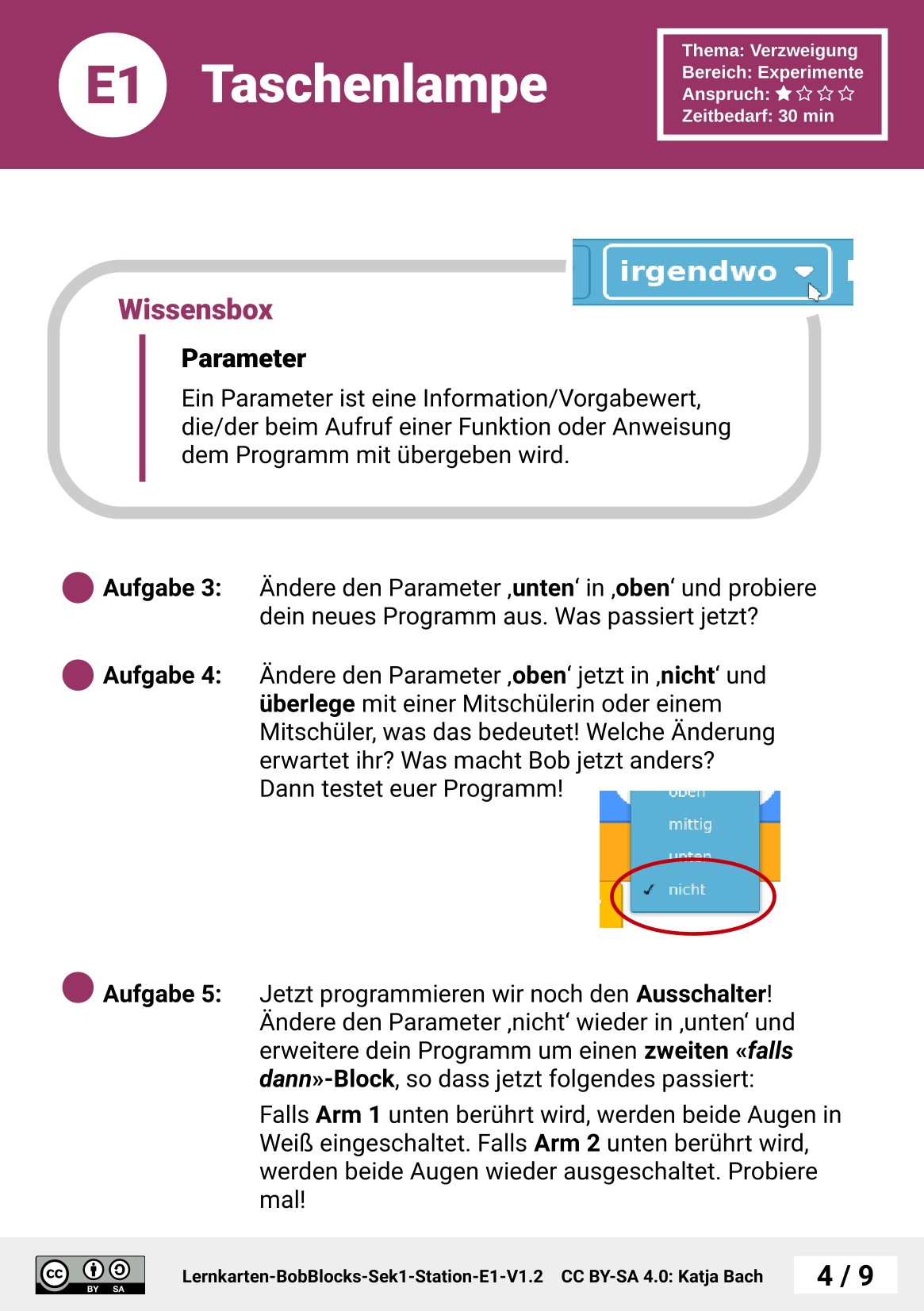
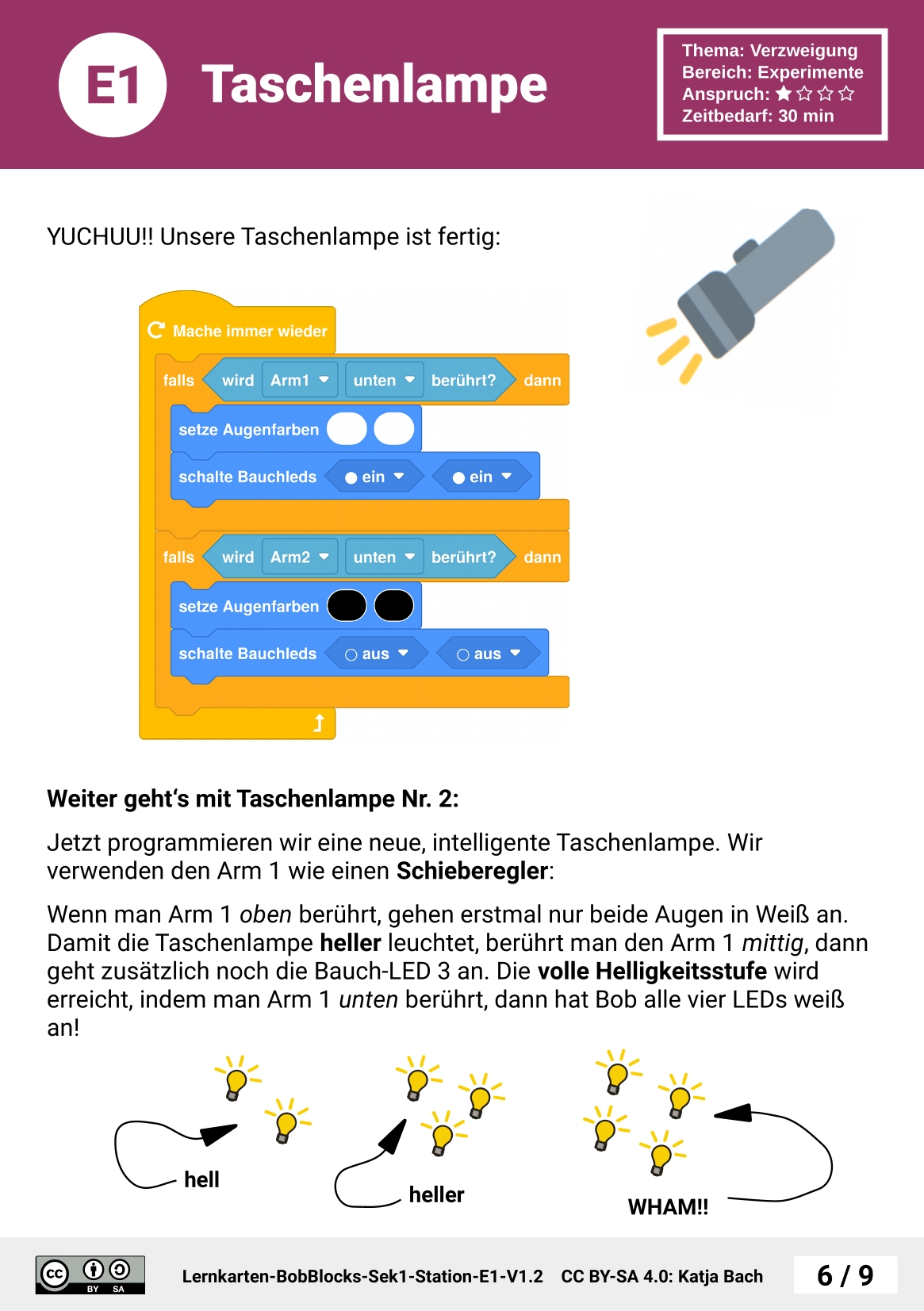
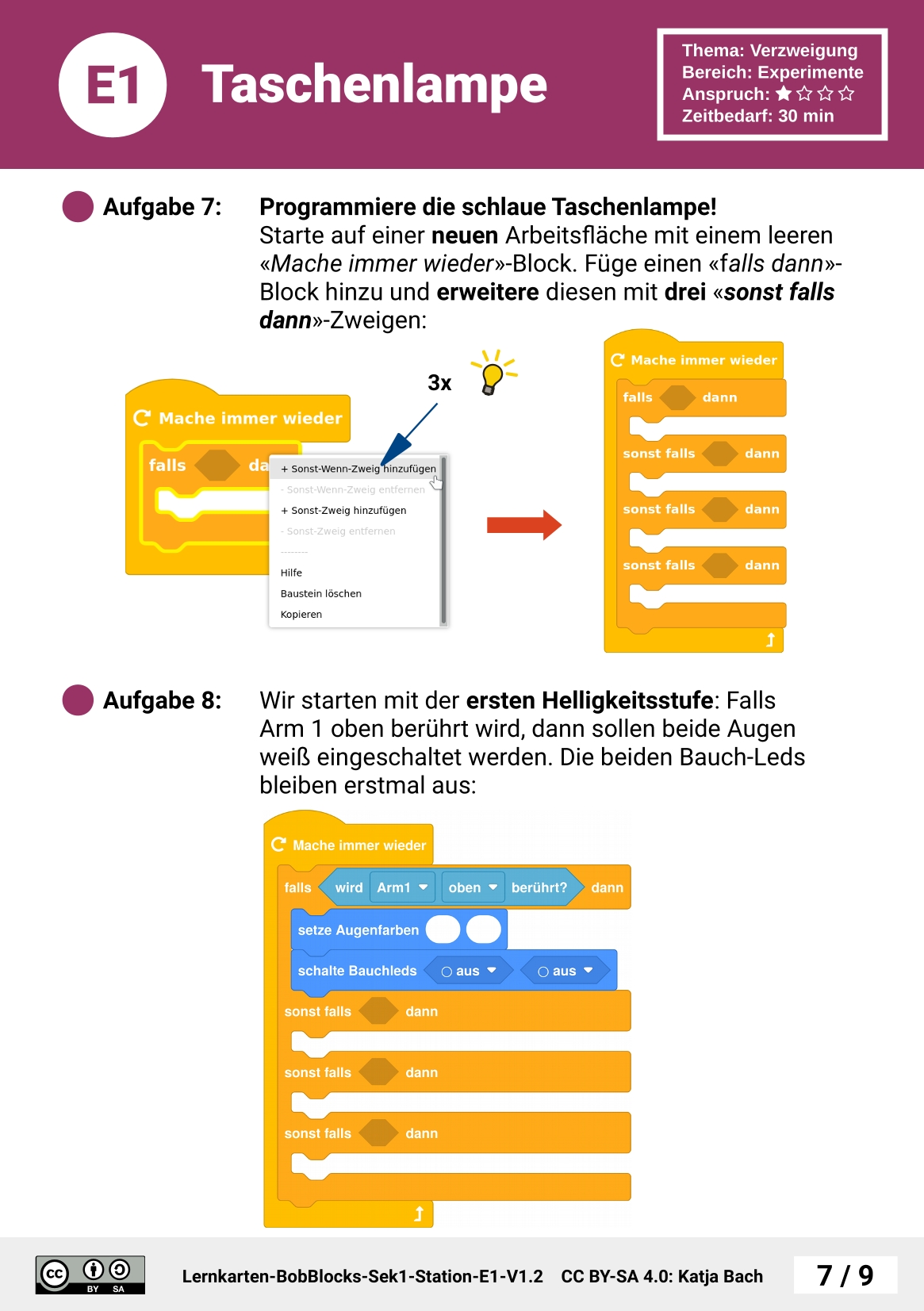
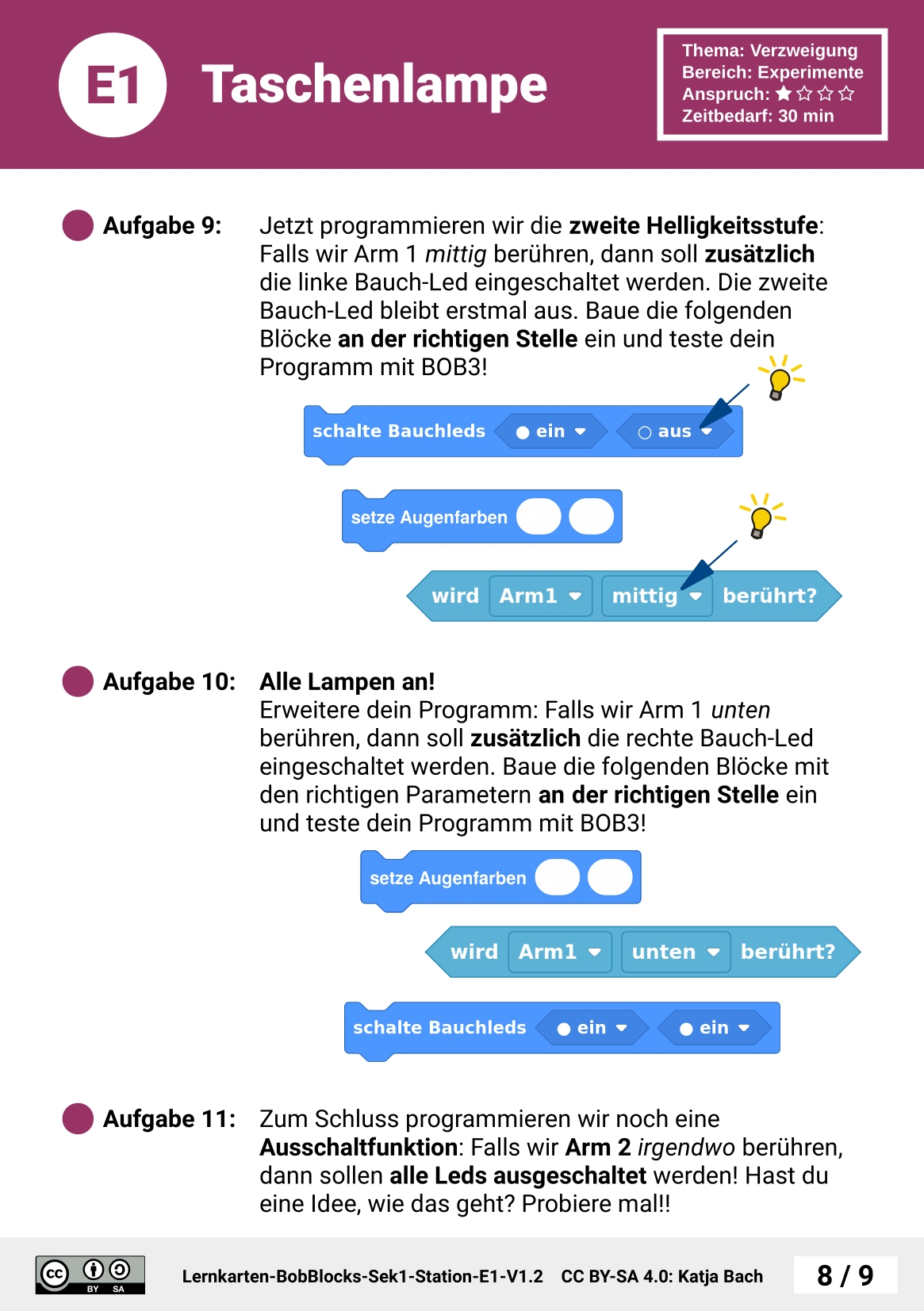
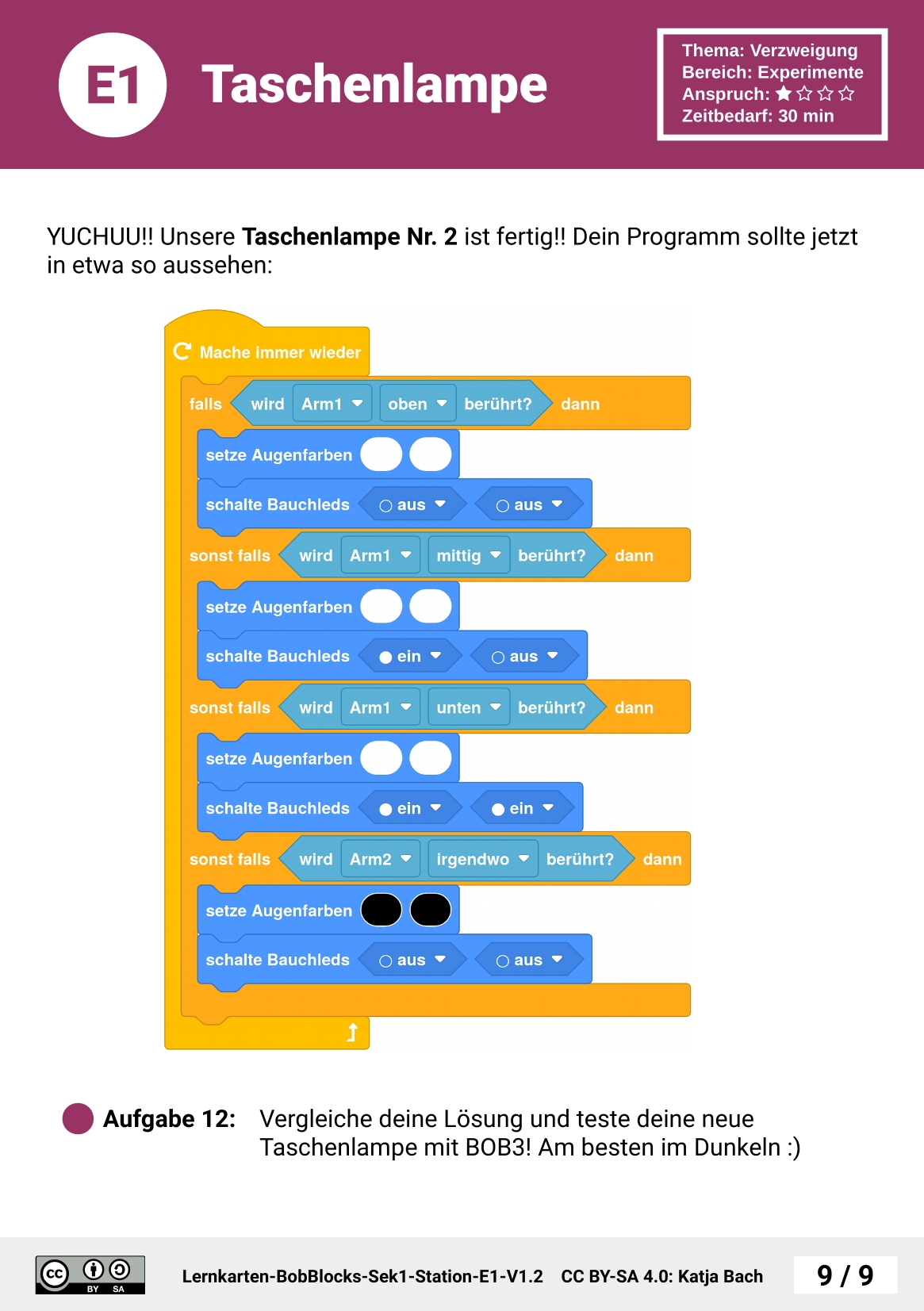
Die SuS bekommen zunächst eine kleine Einführung zum Messprinzip der Touch-Sensoren. Anschließend ändern sie den Parameter des «wird Arm1 irgendwo berührt?»-Blocks in 'oben' und in 'unten' und testen die neuen Programmvarianten. Dann erweitern sie das Programm um einen Ausschalter an Arm 2, und setzen zusätzlich die Bauch-Leds für mehr Licht ein. Im Zweiten Teil starten die SuS mit einem neuen Taschenlampen Programm bei dem sie die Mehrfachverzweigung einsetzen. Dazu erweitern sie den regulären «falls dann»-Block um mehrere «sonst falls dann»-Zweige. In den verschiedenen Zweigen werden dann unterschiedliche Helligkeitsstufen implementiert. Im letzten Zweig werden nach Berührung von Arm 2 alle Leds ausgeschaltet.
Thema: Mehrfachverzweigung
Bereich: Wissen
Lernziele: Bedeutung und Anwendung von Verzweigungen, Vergleichsoperatoren, Wahrheitswerte, «falls-dann»-Block
Anspruch: Einfach
Aufgaben: A1-A12
Zeitbedarf : ca. 30 Minuten
Bereich: Wissen
Lernziele: Bedeutung und Anwendung von Verzweigungen, Vergleichsoperatoren, Wahrheitswerte, «falls-dann»-Block
Anspruch: Einfach
Aufgaben: A1-A12
Zeitbedarf : ca. 30 Minuten
Download-PDF



No comments to display
No comments to display